
Обрабатывает информацию и осуществляет управление всей микропроцессорной системой что это
Обновлено: 25.04.2024
При проектировании систем контроля, управления или вычислений на основе микропроцессора необходимо выяснить и описать функции, подлежащие выполнению в системе, а затем согласовать их с возможностями тех микропроцессоров, которые могут быть использованы в проектируемой системе.
Реальная электронная система на основе микропроцессора содержит значительное число функциональных устройств, одним из которых является микропроцессор. Все устройства системы имеют стандартный интерфейс и подключаются к единой информационной магистрали, как это показано на рис.1.
Микропроцессор в зависимости от требований, предъявляемых к системе, может быть устройством однокристальным или одноплатным, созданным на основе многокристального комплекта микропроцессорных БИС. В высокопроизводительных системах микропроцессор строится на основе биполярных микропроцессорных секций БИС.
Микропроцессор выполняет в системе функции центрального устройства управления и устройства арифметическо-логического преобразования данных. В качестве устройства управления он генерирует последовательности синхронизирующих и логических сигналов, которые определяют последовательности срабатывания всех логических устройств системы. Микропроцессор задает и последовательно осуществляет микрооперации извлечения команд программы из памяти системы, их расшифровку и исполнение. Тип операций микропроцессора определяется кодом операции в команде. В соответствии с этими кодами микропроцессор выполняет арифметические, логические или иные операции над числами, представленными в двоичном или кодированном двоично-десятичном коде.
Числа, подвергающиеся операционным преобразованиям в арифметическо-логическом блоке микропроцессора, называют операндами. Операнд может быть одним из исходных чисел, результатом, константой или некоторым параметром. Операция в микропроцессоре производится над одним или двумя операндами.
Память микропроцессорной системы физически реализуется на основе различных ЗУ. Технико-экономическая целесообразность ведет к построению иерархической памяти на основе полупроводниковых постоянных и оперативных запоминающих устройств и магнитных внешних запоминающих устройств.

Рис.1 Логическая структура микропроцессорной системы
Полупроводниковые постоянные запоминающие устройства ПЗУ позволяют в процессе работы системы осуществлять только чтение заранее записанных данных. Имеют высокую скорость работы и энергонезависимы, т.е. сохраняют информацию при выключении питания.
Полупроводниковые оперативные запоминающие устройства ОЗУ работают в режимах оперативной (совпадающей с темпом работы микропроцессора) записи и чтения данных. Недостаток ОЗУ – их энергозависимость, т.е. потеря записанной информации при выключении питания.
Память системы адресуема, т.е. каждое слово записывается в ячейке памяти со своим уникальным адресом. Слово – совокупность двоичных единиц (бит) – двоичных разрядов, интерпретируемых как отдельное число или несколько смысловых групп двоичных разрядов. Для получения числа из памяти или записи числа в память необходимо точно задать его адрес в памяти и осуществить операцию считывания данных из памяти.
Устройства ввода данных (УВв) – любые средства, предназначенные для передачи данных извне в регистры микропроцессора или в память (клавиатура пульта управления, ввод с перфолент и перфокарт, внешние запоминающие устройства на магнитных лентах, кассетах, дисках, дисплеи и т.д.).
Устройства вывода данных (УВвыв) – любые средства, способные воспринимать данные, передаваемые из регистров микропроцессора или ячеек памяти (дисплеи, печатающие устройства, внешние запоминающие устройства, пульт управления и т.д.).
Для подключения разнообразных устройств ввода или вывода данных (а также комбинированных устройств ввода-вывода) необходимо привести их все связи и сигналы к стандартному виду, т.е. провести согласование интерфейсов. Для этого используется специальный аппаратурный блок – информационный контроллер ИК, имеющий стандартный интерфейс со стороны подключения к информационной магистрали и нестандартный интерфейс со стороны устройств ввода-вывода, т.е. являющийся преобразователем интерфейсных сопряжений.
Микропроцессор МП, ОЗУ и ПЗУ вместе с УВвыв, предназначенными для операций с человеком или другой электронной системой, называется микро-ЭВМ. Микро-ЭВМ – это ЭВМ, центральная часть которой в составе процессора, ОЗУ, ПЗУ, информационного контроллера построена на основе БИС. Применение БИС в качестве основных элементных компонентов обеспечивают микро-ЭВМ такие преимущества перед другими типами ЭВМ, как компактность, надежность, малая материалоемкость, низкие мощность потребления и стоимость. Но магистральная структура микро-ЭВМ и скоростные ограничения микропроцессора определяют умеренные характеристики производительности микро-ЭВМ. Это относится к микро-ЭВМ на основе микропроцессоров на одном или нескольких кристаллах. В микро-ЭВМ на основе биполярных микропроцессорных секций можно получить высокое быстродействие за счет реализации конвейерной обработки данных и скоростного высокоэффективного управления вычислительным процессом даже при магистральной структуре.
Микро-ЭВМ становится центральной частью электронной системы контроля, управления и вычислений, когда она вводится в контур управления некоторого объекта (процесса). Для сопряжения с микро-ЭВМ объект (процесс) должен быть оснащен датчиками состояния и исполнительными механизмами. Датчики выступают как источники вводимой для микро-ЭВМ информации, а исполнительные механизмы – как приемники выводимой информации. Для согласования интерфейсов подключение датчиков и исполнительных механизмов в системе осуществляется через блоки сопряжения датчиков и исполнительных механизмов.
В зависимости от особенностей объекта (процесса) и возможностей микропроцессора сложность каждого устройства или блока устанавливается на этапе проектирования. Части системы могут развиваться или вырождаться, но должен быть обеспечен общий принцип построения и работы всех электронных систем управления. Вследствие прямой зависимости между функциями программных и аппаратурных средств можно при построении электронной системы развивать либо аппаратуру, либо усложнять программное обеспечение. Именно эти обстоятельства и определяют массовые возможности применения микропроцессорных систем управления практически во всех сферах.
Логическая структура универсального программируемого контроллера.
Контроллер (блок местного управления) необходим для управления аппаратами ввода-вывода информации (АВВ). Он обеспечивает электромеханическое и логическое сопряжения информационного канала ЭВМ и частей АВВ, являющихся источниками или приемниками управляющей информации и данных, задает порядок следования, количество, электрические параметры, положение во времени и направление прохождения информации между информационными каналами и АВВ. Основная задача контроллера заключается в обеспечении условий отпирания и запирания одиночных вентилей или их групп, а также в запуске различного рода электрических двигателей, электромеханических переключателей, возбуждении соленоидов, приеме усиленных и сформированных разнообразных сигналов датчиков информации АВВ.
При любых вариантах функционального разбиения системы на части аппаратурные средства блока сопряжения с АВВ либо интегрируется со средствами БИС микропроцессора, либо выполняются отдельно в виде интерфейсной (интерфейсных) БИС.
Контроллер можно выполнить жестким соединением между группами вентилей, триггеров и т.д. как цифровой автомат на основе аппаратурной логики. Минимизация количества электронных элементов для корпусов интегральных схем, как правило, приводит к неупорядоченной электронной структуре, специализированной на конкретное использование только в данном устройстве. Изменение во временной диаграмме или введение новых сигналов в аппаратурном контроллере влекут за собой необходимость перепроектирования и переконструирования всего контроллера или его части.
Универсальные программируемые контроллеры реализуются в виде однокристальных БИС или на основе секций микропроцессорных комплектов БИС. В таких контроллерах разнообразные временные диаграммы сигналов и их последовательности порождаются не распределением регулярных сигналов тактовых генераторов путем проводных соединений, а преобразованием последовательностей команд (микрокоманд). Из-за гибкости программных и микропрограммных средств адаптации программируемого контроллера к конкретной области применения осуществляется за счет перепрограммирования, не затрагивающего аппаратурную реализацию контроллера или вызывающего только перезапись содержимого управляющих запоминающих устройств.
Технико-экономические параметры интегральных схем с высокой степенью интеграции элементов позволяют осуществлять управление АВВ информации ЭВМ посредством электронных структур, подобных структурам управляющих ЭВМ. При этом обеспечиваются: 1) функциональная гибкость за счет использования развитых систем команд и построения разнообразных сложных последовательностей сигналов на их основе с возможностью учета реакции системы на выдаваемые сигналы; 2) использование распределенных методов управления в иерархических управляющих системах, когда оптимизация процесса преобразования информации ведется на верхнем уровне управления, а непосредственное локальное управление осуществляется встроенным контроллером, воспринимающим и интерпретирующим как состояние АВВ, так и управляющие сигналы средств более высокого уровня управления; 3) простота специализации и модификации устройства управления АВВ.
Алгоритм управления определенным типом АВВ задается однозначно и в виде программы может быть записан в ПЗУ. Таким образом, программируемый контроллер в процессе работы многократно может выполнять одну и ту же программу, получая с более высокого уровня управления исходные данные и задания и функционируя автономно, независимо и параллельно с работой средств более высокого уровня.

Рис.2 Логическая структура универсального программного контроллера
Логическая структура универсального программируемого контроллера приведена на рис.2. Контроллер имеет магистральную структуру. Управление АВВ обеспечивают микропроцессор МП, микроконтроллер и микро-ЭВМ, выполненная на одном кристалле. Если аппаратурных возможностей микропроцессора МП недостаточно, то к магистралям подключаются расширяющие ОЗУ и ПЗУ; поле памяти этих устройств может управлять дополнительным контроллером. Однако в отличие от микро-ЭВМ в контроллере системные функции расширяющих ОЗУ и ПЗУ развиты очень слабо и поэтому для управления ими достаточно простейших аппаратурных средств, обычно закладываемых в кристаллы БИС ОЗУ и ПЗУ. Узлы программируемого интерфейса УПИ и узлы сопряжения УС с пультом управления ПУ и АВВ имеют модульную структуру, что позволяет наращивать их при усложнении АВВ и увеличении их числа. Контроллер работает по жестко заданной, заранее отработанной и введенной в него программе. Во время работы контроллера нет необходимости в его взаимодействии с человеком.
Узлы программируемого интерфейса УПИ дают возможность учесть специфику АВВ и осуществить переход от внутрисистемного интерфейса информационной магистрали к интерфейсу разнообразных АВВ. Специализация шин управления АВВ обеспечивается подачей сигналов при выполнении определенной последовательности команд МП; их число зависит от числа узлов программируемого интерфейса УПИ.

Рис.3 Обобщенная логическая структура микро-ЭВМ с микропроцессорными контроллерами
Логическая структура развитой микропроцессорной системы
На рис.3 приведена обобщенная логическая структура микро-ЭВМ, в которой в качестве всех управляющих блоков устройств ЭВМ используются программируемые контроллеры, например контроллер системного пульта управления КСПУ. Он применяется для работы с системным пультом управления СПУ. Все аппараты ввода-вывода управляются контроллерами устройств ввода-вывода КУВВ или групповыми контроллерами устройств ввода-вывода ГрКУВВ. Оперативное ОЗУ и постоянные запоминающие устройства ПЗУ управляются с помощью соответствующих контроллеров КОЗУ, КПЗУ. При такой организации ЭВМ центральный процессор ЦП обеспечивает программируемые контроллеры только управляющей информацией высокого уровня, детализируемой контроллером. Поэтому количество управляющей информации на информационной магистрали системы резко уменьшается, что позволяет увеличить скорость передачи данных. По существу, в этой схеме приведена многопроцессорная вычислительная система, в которой в пределе контроллер имеет те же возможности, что и центральный процессор. Низкая стоимость и высокая надежность БИС позволяют для достижения желаемых параметров ввести распределенную обработку во всех подсистемах вычислительной системы, что определяет новые способы организации вычислительных процессов в системах с децентрализованными управлением и обработкой информации.
Раздел: Информатика, программирование
Количество знаков с пробелами: 65335
Количество таблиц: 1
Количество изображений: 10
Аннотация: В этой лекции рассказывается о базовой терминологии микропроцессорной техники, о принципах организации микропроцессорных систем, о структуре связей, режимах работы и об основных типах микропроцессорных систем.
В этой главе рассматриваются базовые концепции, которые лежат в основе любой микропроцессорной системы — от простейшего микроконтроллера до сложного компьютера. Именно в этом смысле здесь используется термин "философия".
Для начала несколько основных определений.
- Электронная система — в данном случае это любой электронный узел, блок, прибор или комплекс, производящий обработку информации.
- Задача — это набор функций, выполнение которых требуется от электронной системы.
- Быстродействие — это показатель скорости выполнения электронной системой ее функций.
- Гибкость — это способность системы подстраиваться под различные задачи.
- Избыточность — это показатель степени соответствия возможностей системы решаемой данной системой задаче.
- Интерфейс — соглашение об обмене информацией, правила обмена информацией, подразумевающие электрическую, логическую и конструктивную совместимость устройств, участвующих в обмене. Другое название — сопряжение.
Микропроцессорная система может рассматриваться как частный случай электронной системы, предназначенной для обработки входных сигналов и выдачи выходных сигналов (рис. 1.1). В качестве входных и выходных сигналов при этом могут использоваться аналоговые сигналы, одиночные цифровые сигналы, цифровые коды, последовательности цифровых кодов. Внутри системы может производиться хранение, накопление сигналов (или информации), но суть от этого не меняется. Если система цифровая (а микропроцессорные системы относятся к разряду цифровых), то входные аналоговые сигналы преобразуются в последовательности кодов выборок с помощью АЦП , а выходные аналоговые сигналы формируются из последовательности кодов выборок с помощью ЦАП . Обработка и хранение информации производятся в цифровом виде.
Характерная особенность традиционной цифровой системы состоит в том, что алгоритмы обработки и хранения информации в ней жестко связаны со схемотехникой системы. То есть изменение этих алгоритмов возможно только путем изменения структуры системы, замены электронных узлов, входящих в систему, и/или связей между ними. Например, если нам нужна дополнительная операция суммирования, то необходимо добавить в структуру системы лишний сумматор . Или если нужна дополнительная функция хранения кода в течение одного такта, то мы должны добавить в структуру еще один регистр . Естественно, это практически невозможно сделать в процессе эксплуатации, обязательно нужен новый производственный цикл проектирования, изготовления, отладки всей системы. Именно поэтому традиционная цифровая система часто называется системой на "жесткой логике".
Любая система на "жесткой логике" обязательно представляет собой специализированную систему, настроенную исключительно на одну задачу или (реже) на несколько близких, заранее известных задач. Это имеет свои бесспорные преимущества.
Во-первых, специализированная система (в отличие от универсальной) никогда не имеет аппаратурной избыточности, то есть каждый ее элемент обязательно работает в полную силу (конечно, если эта система грамотно спроектирована).
Во-вторых, именно специализированная система может обеспечить максимально высокое быстродействие , так как скорость выполнения алгоритмов обработки информации определяется в ней только быстродействием отдельных логических элементов и выбранной схемой путей прохождения информации. А именно логические элементы всегда обладают максимальным на данный момент быстродействием.
Но в то же время большим недостатком цифровой системы на "жесткой логике" является то, что для каждой новой задачи ее надо проектировать и изготавливать заново. Это процесс длительный, дорогостоящий, требующий высокой квалификации исполнителей. А если решаемая задача вдруг изменяется, то вся аппаратура должна быть полностью заменена. В нашем быстро меняющемся мире это довольно расточительно.
Путь преодоления этого недостатка довольно очевиден: надо построить такую систему, которая могла бы легко адаптироваться под любую задачу, перестраиваться с одного алгоритма работы на другой без изменения аппаратуры. И задавать тот или иной алгоритм мы тогда могли бы путем ввода в систему некой дополнительной управляющей информации, программы работы системы (рис. 1.2). Тогда система станет универсальной, или программируемой, не жесткой, а гибкой. Именно это и обеспечивает микропроцессорная система .
Но любая универсальность обязательно приводит к избыточности. Ведь решение максимально трудной задачи требует гораздо больше средств, чем решение максимально простой задачи. Поэтому сложность универсальной системы должна быть такой, чтобы обеспечивать решение самой трудной задачи, а при решении простой задачи система будет работать далеко не в полную силу, будет использовать не все свои ресурсы. И чем проще решаемая задача, тем больше избыточность , и тем менее оправданной становится универсальность . Избыточность ведет к увеличению стоимости системы, снижению ее надежности, увеличению потребляемой мощности и т.д.
Кроме того, универсальность , как правило, приводит к существенному снижению быстродействия. Оптимизировать универсальную систему так, чтобы каждая новая задача решалась максимально быстро, попросту невозможно. Общее правило таково: чем больше универсальность , гибкость, тем меньше быстродействие . Более того, для универсальных систем не существует таких задач (пусть даже и самых простых), которые бы они решали с максимально возможным быстродействием. За все приходится платить.
Таким образом, можно сделать следующий вывод . Системы на "жесткой логике" хороши там, где решаемая задача не меняется длительное время, где требуется самое высокое быстродействие , где алгоритмы обработки информации предельно просты. А универсальные, программируемые системы хороши там, где часто меняются решаемые задачи, где высокое быстродействие не слишком важно, где алгоритмы обработки информации сложные. То есть любая система хороша на своем месте.
Однако за последние десятилетия быстродействие универсальных ( микропроцессорных ) систем сильно выросло (на несколько порядков). К тому же большой объем выпуска микросхем для этих систем привел к резкому снижению их стоимости. В результате область применения систем на "жесткой логике" резко сузилась. Более того, высокими темпами развиваются сейчас программируемые системы, предназначенные для решения одной задачи или нескольких близких задач. Они удачно совмещают в себе как достоинства систем на "жесткой логике", так и программируемых систем, обеспечивая сочетание достаточно высокого быстродействия и необходимой гибкости. Так что вытеснение "жесткой логики" продолжается.
1.1. Что такое микропроцессор?
Ядром любой микропроцессорной системы является микропроцессор или просто процессор (от английского processor ). Перевести на русский язык это слово правильнее всего как "обработчик", так как именно микропроцессор — это тот узел, блок, который производит всю обработку информации внутри микропроцессорной системы . Остальные узлы выполняют всего лишь вспомогательные функции : хранение информации (в том числе и управляющей информации, то есть программы), связи с внешними устройствами, связи с пользователем и т.д. Процессор заменяет практически всю "жесткую логику", которая понадобилась бы в случае традиционной цифровой системы. Он выполняет арифметические функции ( сложение , умножение и т.д.), логические функции (сдвиг, сравнение, маскирование кодов и т.д.), временное хранение кодов (во внутренних регистрах), пересылку кодов между узлами микропроцессорной системы и многое другое. Количество таких элементарных операций, выполняемых процессором, может достигать нескольких сотен. Процессор можно сравнить с мозгом системы.
Но при этом надо учитывать, что все свои операции процессор выполняет последовательно, то есть одну за другой, по очереди. Конечно, существуют процессоры с параллельным выполнением некоторых операций, встречаются также микропроцессорные системы , в которых несколько процессоров работают над одной задачей параллельно, но это редкие исключения. С одной стороны, последовательное выполнение операций — несомненное достоинство, так как позволяет с помощью всего одного процессора выполнять любые, самые сложные алгоритмы обработки информации. Но, с другой стороны, последовательное выполнение операций приводит к тому, что время выполнения алгоритма зависит от его сложности. Простые алгоритмы выполняются быстрее сложных. То есть микропроцессорная система способна сделать все, но работает она не слишком быстро, ведь все информационные потоки приходится пропускать через один-единственный узел — микропроцессор (рис. 1.3). В традиционной цифровой системе можно легко организовать параллельную обработку всех потоков информации, правда, ценой усложнения схемы.
Итак, микропроцессор способен выполнять множество операций. Но откуда он узнает, какую операцию ему надо выполнять в данный момент? Именно это определяется управляющей информацией, программой. Программа представляет собой набор команд (инструкций), то есть цифровых кодов, расшифровав которые, процессор узнает, что ему надо делать. Программа от начала и до конца составляется человеком, программистом, а процессор выступает в роли послушного исполнителя этой программы, никакой инициативы он не проявляет (если, конечно, исправен). Поэтому сравнение процессора с мозгом не слишком корректно. Он всего лишь исполнитель того алгоритма, который заранее составил для него человек. Любое отклонение от этого алгоритма может быть вызвано только неисправностью процессора или каких-нибудь других узлов микропроцессорной системы .
Все команды, выполняемые процессором, образуют систему команд процессора. Структура и объем системы команд процессора определяют его быстродействие , гибкость, удобство использования . Всего команд у процессора может быть от нескольких десятков до нескольких сотен. Система команд может быть рассчитана на узкий круг решаемых задач (у специализированных процессоров) или на максимально широкий круг задач (у универсальных процессоров). Коды команд могут иметь различное количество разрядов (занимать от одного до нескольких байт ). Каждая команда имеет свое время выполнения , поэтому время выполнения всей программы зависит не только от количества команд в программе, но и от того, какие именно команды используются.
Для выполнения команд в структуру процессора входят внутренние регистры, арифметико-логическое устройство ( АЛУ , ALU — Arithmetic Logic Unit ) , мультиплексоры, буферы, регистры и другие узлы. Работа всех узлов синхронизируется общим внешним тактовым сигналом процессора. То есть процессор представляет собой довольно сложное цифровое устройство (рис. 1.4).
Впрочем, для разработчика микропроцессорных систем информация о тонкостях внутренней структуры процессора не слишком важна. Разработчик должен рассматривать процессор как " черный ящик ", который в ответ на входные и управляющие коды производит ту или иную операцию и выдает выходные сигналы. Разработчику необходимо знать систему команд, режимы работы процессора, а также правила взаимодействия процессора с внешним миром или, как их еще называют, протоколы обмена информацией. О внутренней структуре процессора надо знать только то, что необходимо для выбора той или иной команды, того или иного режима работы.
Сертификат и скидка на обучение каждому участнику

Свидетельство и скидка на обучение каждому участнику
Описание презентации по отдельным слайдам:
Описание слайда:
Введение в цифровую электронику
Лекция 4
Основные понятия микропроцессорной техники
кандидат технических наук, доцент
Новиков Юрий Витальевич
Описание слайда:
Описание слайда:
3
Особенности микропроцессорных систем
Гибкая логика работы — меняется в зависимости от задачи;
Универсальность — может решать очень много задач;
Простота проектирования аппаратуры — единообразие схемотехнических решений;
Простота отладки — единообразие системы связей и протоколов обмена;
Аппаратурная избыточность, особенно для простых задач;
Ниже быстродействие, чем у устройств с жёсткой логикой;
Необходимость разработки и отладки программного обеспечения.
Описание слайда:
4
Основные термины
Процессор — обработчик и вычислитель, выполняющий все операции над кодами и сигналами;
Программа — набор управляющих кодов (команд), определяющих логику работы системы;
Команда — управляющий код, указывающий процессору, что ему надо делать в данный момент;
Шина (магистраль, канал) — линии связи, объединяющие устройства микропроцессорной системы;
Интерфейс (сопряжение) — соглашение об обмене информацией, а также технические средства для реализации этого обмена.
Описание слайда:
5
Информационные потоки в микропроцессорной системе
Описание слайда:
6
Структура простейшего микропроцессора
Описание слайда:
7
Структура микропроцессорной системы
Описание слайда:
8
Устройства микропроцессорной системы
Процессор — обработчик, выполняет пересылку и обработку информации (арифметическую, логическую) в соответствии с программой; управляет выборкой команд;
Память — оперативная (RAM) и постоянная (ROM) — хранит данные и программы. Оперативная — для временного хранения данных и программ, постоянная — для постоянного хранения, главное — для программы начального запуска при включении питания.
Устройства ввода/вывода (УВВ, I/O — Input/Output) — для обеспечения связи микропроцессорной системы с внешними устройствами и с пользователем (внешние интерфейсы и пользовательский интерфейс). Они же помогают процессору в пересылке данных и в реагировании на внешние события.
Описание слайда:
9
Шины микропроцессорной системы
Шина адреса (Address Bus) — для пересылки кода адреса (индивидуального номера устройства, участвующего в обмене в данный момент).
Шина данных (Data Bus) — для пересылки данных между устройствами. Двунаправленная шина, состоит из нескольких байтов (1, 2, 4, 8);
Шина управления (Control Bus) — для пересылки отдельных управляющих сигналов: тактовых, стробирующих, подтверждающих, инициирующих и т.д.;
Шина питания (Power Bus) — для подведения к устройствам напряжений питания (положительных, отрицательных, общего провода).
Описание слайда:
10
Фазы цикла обмена
Адресная фаза: процессор (задатчик, Master) выставляет адрес УВВ (или ячейки памяти), к которому хочет обратиться (исполнитель, Slave);
Фаза данных:
Цикл записи: процессор выставляет данные, предназначенные для записи, и выдаёт строб записи. Исполнитель принимает данные от процессора.
Цикл чтения: процессор выдаёт строб чтения. Исполнитель выставляет данные для передачи процессору. Процессор принимает данные от исполнителя.
Фаза подтверждения (не обязательна): исполнитель выдаёт процессору сигнал подтверждения выполнения операции
Описание слайда:
11
Циклы обмена в микропроцессорной системе
Программные циклы обмена
Чтение (ввод, выборка) команды из памяти (оперативной или постоянной);
Чтение (ввод) данных из памяти;
Запись (вывод) данных в память;
Приём (чтение, ввод) данных из устройства ввода/вывода;
Передача (запись, вывод) данных в устройство ввода/вывода;
Циклы обмена по прерываниям (Interrupts);
Циклы обмена по прямому доступу к памяти (ПДП, DMA – Direct Memory Access);
Циклы обмена при захвате шины.
Описание слайда:
12
Программный обмен информацией
Описание слайда:
13
Методы реакции на внешнее событие
С помощью периодического программного контроля факта наступления события (метод опроса флага или Polling). Самая быстрая реакция, но процессор не может заниматься ничем другим;
С помощью прерывания, то есть насильственного перевода процессора с выполнения текущей программы на выполнение экстренно необходимой программы ─ программы обработки прерывания. Более медленная реакция, обмен — со скоростью процессора
С помощью прямого доступа к памяти (ПДП), то есть без участия процессора при его отключении от системной магистрали. Медленная реакция, обмен — со скоростью контроллера ПДП (быстрее, чем процессор).
Описание слайда:
Описание слайда:
15
Обслуживание прямого доступа к памяти (ПДП)
Описание слайда:
16
Информационные потоки в режиме ПДП
Описание слайда:
17
Одношинная (принстонская) архитектура
Описание слайда:
18
Двухшинная (гарвардская) архитектура
Описание слайда:
19
Сравнение архитектур
Одношинная (принстонская) архитектура — проще, меньше требований к процессору, более гибкое перераспределение памяти между программами и данными (память обычно большая), но медленнее (тратится время на чтение команд). Сложные универсальные системы.
Двухшинная (гарвардская) архитектура — сложнее, больше требований к процессору(одновременное обслуживание двух потоков), нельзя перераспределять память (память обычно небольшая), но быстрее (команды читаются одновременно с пересылкой данных). Простые однокристальные системы — специализированные.
Описание слайда:
20
Типы микропроцессорных систем
Микроконтроллеры — наиболее простой тип микропроцессорных систем, в которых все или большинство узлов системы выполнены в виде одной микросхемы. Узко специализированы, закрыты, шина недоступна.
Контроллеры — управляющие микропроцессорные системы, выполненные в виде отдельных модулей. Класс задач.
Микрокомпьютеры — более мощные микропроцессорные системы с развитыми средствами сопряжения с внешними устройствами. Гибко настраиваемые. Шина доступна.
Компьютеры (в том числе и персональные компьютеры) — самые мощные и наиболее универсальные микропроцессорные системы. Универсальные, дорогие, избыточные.
Если Вы считаете, что материал нарушает авторские права либо по каким-то другим причинам должен быть удален с сайта, Вы можете оставить жалобу на материал.
Электронная система – это блок, который состоит из электронных компонентов, на вход которого поступают электрические сигналы и в котором производится обработка и хранение этих сигналов.
Электронная система может формировать выходные сигналы в зависимости от входных сигналов в данный момент времени, в предыдущие моменты времени и собственно от момента времени. Электрические сигналы могут быть следующих видов: аналоговые сигналы, цифровые сигналы и цифровые шины.
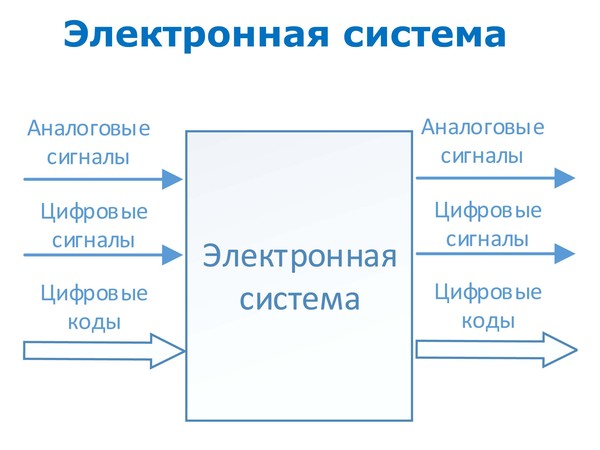
Аналоговый сигнал – это сигнал, уровень напряжения которого может принимать любое значение из некоторого диапазона, например, от 0 до 5 Вольт.
Цифровой сигнал – это частный случай аналогового сигнала, который может принимать только два значения – высокий и низкий уровень, например, высокий уровень – 5 Вольт, низкий уровень – 0 Вольт. Цифровой сигнал в один момент времени может передавать один бит информации – 0 или 1. Обычно высокому уровню соответствует 1, низкому – 0.
Цифровая шина – это набор цифровых сигналов, объединенных общей функцией. По цифровой шине в один момент времени может быть передано двоичное число, количество разрядов которого равно количеству проводов в шине. Исторически электронные системы разрабатывались для решения какой-то одной задачи. Для каждой новой задачи, даже если изменения были незначительными, приходилось заново разрабатывать и изготавливать систему, что дорого и занимает много времени. Поэтому было решено создать некий универсальный блок, который можно использовать для решения широкого круга задач.
Так появились микропроцессорные системы.

Микропроцессор – это микросхема, которая может выполнять одно из определенных действий, в зависимости от управляющей программы. То есть микропроцессор обладает универсальностью – при изменении условий задачи в ряде случаев можно внести изменения в программу, а конструктивно система не поменяется. Микропроцессор работает только с цифровыми шинами, для подключения аналоговых и цифровых сигналов необходимо использовать согласующие устройства. Микропроцессор состоит из арифметико-логического устройства, в котором и выполняются действия, указанные в программе. Это арифметические и логические действия с числами, которые передаются по цифровым шинам, подключенным к
микропроцессору. Схема управления выборкой команд определяет то действие, которое будет
выполнять арифметико-логическое устройство в данный момент в зависимости от программы. Логика управления осуществляет синхронизацию работы всех блоков.Регистры – это ячейки памяти, в которых хранятся данные для выполнения программы и некоторая служебная информация, необходимая для корректной работы микропроцессора.

Рассмотрим схему подключения микропроцессора.

Микропроцессору необходимо питание, напряжение лежит в диапазоне от 1,5 до 5 вольт. Общий провод или земля – это нулевой уровень напряжения, т.е. такой уровень, относительно которого отсчитываются все напряжения в системе. Тактовый сигнал представляет собой набор импульсов. После появления очередного импульса микропроцессор начинает выполнение очередного действия, указанного в программе и должен завершить его до прихода следующего импульса. Также тактовый сигнал обеспечивает синхронную работу всех блоков внутри микропроцессора. Сигнал сброса переводит микропроцессор в начальное состояние – т.е. в такое состояние, в котором микропроцессор оказывается при включении питания. Обмен информацией микропроцессора с другими устройствами в системе производится по трем шинам – шине адреса, шине данных и шине управления, которые через согласующий буфер объединяются в магистральную шину для удобства подключения других устройств. Шина адреса используется для выбора источника или получателя данных, по шине данных передаются собственно данные, шина управления обеспечивает синхронизацию и определяет, что именно происходит – запись или чтение данных.

Рассмотрим процесс обмена данными более подробно. Например, подключение
блока памяти к микропроцессору. Память состоит из ячеек, каждая из которых имеет собой уникальный адрес и в которую можно записать какое-либо число. Для того, чтобы записать число в память, микропроцессор выставляет на шине управления сигнал, соответствующий циклу записи, на шине адреса – адрес ячейки, к которую необходимо записать данные, а на шине данных – те данные, которые нужно записать. Блок память производить запись данных в соответствующую ячейку. Для того, чтобы считать данные, микропроцессор выставляет на шине управления сигнал, соответствующий циклу чтения, а на шине адреса – адрес ячейки памяти, из которой нужно считать данные. После этого блок памяти выдаст на шину
Читайте также:
- В каком году в россии благотворительность законодательно признана правовым видом деятельности
- Кому была присуждена нобелевская премия по литературе за 2019 год
- Как сохранить сертификат вакцинации с госуслуг в айфоне
- Психологическое здоровье несовершеннолетнего как научить ребенка своевременно обращаться за помощью
- Кто осуществляет раздачу пищи в отделении итар