
Можно ли обеспечить нулевую среднеквадратическую погрешность фильтрации полезных сигналов
Обновлено: 15.05.2024
Цель. Ознакомление с наиболее распространенными в АСУТП алгоритмами фильтрации измеряемых случайных сигналов, проведение сравнительного анализа их точности и особенностей реализации в ЦВМ.
Задание. 1) составить и отладить подпрограммы фильтрации для ЦВМ по методам скользящего среднего, экспоненциального сглаживания и статистической фильтрации по одной точке замера, 2) для заданных характеристик случайных сигналов рассчитать оптимальные параметры фильтров, 3) смоделировать систему фильтрации на ЦВМ и вычислить погрешность фильтрацию по каждому из рассмотренных методов, 4) провести сравнительный анализ эффективности рассмотренных алгоритмов.
Основные положения. 1 Постановка задачи оптимальной фильтрации. Сигналы от измерительных устройств часто содержат случайную погрешность – помеху. Задача фильтрации состоит в том, чтобы в той или иной степени отделить полезную составляющую сигнала от помехи. Как правило, и полезный сигнал, и помеха предполагаются стационарными случайных процессами для которых известны их статистические характеристики: математическое ожидание, дисперсия, корреляционная функция, спектральная плотность. Зная эти характеристики нужно найти фильтр в классе линейных динамических систем или в более узком классе линейных систем с заданной структурой так, чтобы сигнал на выходе фильтра возможно меньше отличался от полезного сигнала.
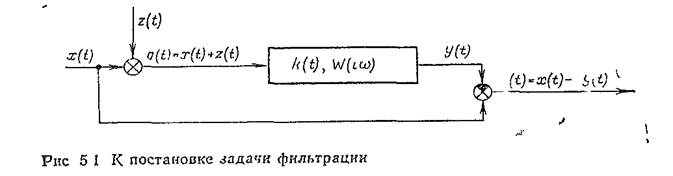
Введем обозначения и поставим задачу фильтрации точнее. Пусть на вход фильтра с импульсной характеристикой к(t) и соответствующей (в силу Фурье преобразования) 0
АФХ W(iω) поступают полезные сигналы x(t) и некорреляционная с ним помеха z(t) (рис.5.1). Корреляционные функции и спектральные плотности полезного сигнала и помехи обозначим Rx(t), Sx(t), Rz(t) и Sz(t). Требуется найти характеристики фильтра k(t) или W(t) так, чтобы среднеквадратичное значение разности ε между сигналом на выходе фильтра и полезным сигналом x было минимальным. Если характеристика фильтра известна с точностью до одного или нескольких параметров, то надо выбрать оптимальные значения этих параметров.
Ошибка ε содержит две составляющие. Первая (ε1) связана с тем, что некоторая часть помехи все же пройдет через фильтр, а вторая (ε2) – с тем, что форма полезного сигнала при прохождении через фильтр изменится. Таким образом, определение оптимальной характеристики фильтра представляет собой поиск компромиссного решения, минимизирующего суммарную погрешность.
Представим частотную характеристику фильтра в виде:
По формулам, связывающим спектральные плотности случайных процессов на входе и выходе линейной системы с ее частотной характеристикой подсчитываем спектральные плотности каждой из составляющих ошибки.
Для ошибки, связанной с пропуском помехи, получим
Спектральная плотность ошибки, связанной с искажением полезного сигнала, равна
Сумма этих составляющих Sε имеет спектральную плотность
Если учесть, что
|1 – W(iω)| 2 = [1 – А(ω)cosf(ω)] 2 + А 2 (ω) sin 2 f(ω),
Среднеквадратичная ошибка связана со спектральной плотностью выражением

Минимизируя Sε(ω) по f(ω) и А(ω), приходим к уравнениям

cos f*(ω) = 1 f*(ω) = 0

2Sz(ω)A(ω) – 2Sx(ω)[1 – A(ω)] = 0

(5.2)
Найденным характеристикам оптимального фильтра соответствует спектральная плотность ошибки

Минимальная среднеквадратичная ошибка

(5.3)
К сожалению, найденный фильтр не реализуем так как условие равенства нулю на всех частотах фазо-частотной характеристики означает, что импульсная характеристика фильтра – четная функция она отлична от нуля не только при t>0, но и при t
Физический смысл соотношения (5.2,б) иллюстрируется рис. 5.3. Если спектры полезного сигнала и помехи не перекрываются, то А(ω) должно быть равно нулю там, где спектральная плотность помехи отлична от нуля, и равно единице для всех частот, на которых Sx(ω)>0. На рис. 5.3,6 показан, характер А*(ω) в случае, когда спектральные плотности сигнала и помехи перекрывают друг друга.
Среди фильтров с заданной структурой наиболее широкое распространение нашли фильтры, основанные на операции скользящего среднего, а также экспоненциальный фильтр и так называемый статистический фильтр нулевого порядка. Экспоненциальный фильтр представляет собой апериодическое звено первого порядка, а статистический фильтр нулевого порядка – усилительное звено. Рассмотрим каждый из упомянутых фильтров подробнее.
Фильтр скользящего среднего. Выход фильтра связан с его входом соотношением

Импульсная переходная функция фильтра показана на рис. 5.4,а. Частотные характеристики равны


Импульсная характеристика может быть выражена через функцию Хевисайда 1(t)
k(t) = k[1(t) – 1(t – T)].
Настраиваемыми параметрами фильтра являются коэффициент усиления k и память Т.
Экспоненциальный фильтр (рис. 5.4,б). Сигнал на выходе определяется дифференциальным уравнением
Импульсная характеристика имеет вид:



Параметрами фильтра являются коэффициент усиления k и постоянная времени, обратная величине γ.

Статистический фильтр нулевого порядка. Этот фильтр, как упоминалось выше, является усилительным звеном. Его характеристики
y(t) = kg(t); A(ω) = k; f(ω) = 0
Вес перечисленные фильтры не позволяют добиться идеальной фильтрации даже при непересекающихся спектрах сигнала и помехи. Минимизировать ошибку σε можно, подбирая параметры k, Т, γ. При этом нужно характеристики фильтра А(ω) и f(ω) как функции частоты и параметров подставить в формулу (5.1), взять интеграл от получившегося выражения, который будет функцией параметров фильтра, и найти минимум этого интеграла по параметрам.
Например, для статистического фильтра кулевого порядка спектральная плотность ошибки будет иметь вид:
Интеграл Sε равен дисперсии помехи, умноженной на π. Получим

Учтем, что интегралы в правой части этого равенства равны дисперсиям полезного сигнала, и помехи, так что

Условие минимума этого выражения по k приводит к равенству

После подстановки найденного значения k в выражение для дисперсии ошибки получим:

Фильтры текущего среднего и экспоненциальный имеют по два настраиваемых, параметра, и их оптимальные значения не
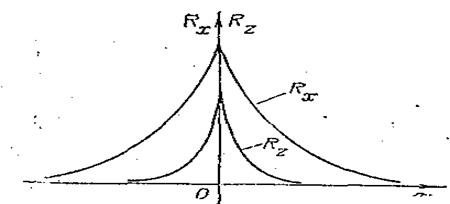 |
| Рис. 5.6. Автокорреляционные функции полезного сигнала Rx(τ) и шума Rz(τ). |
удастся так легко выразить через характеристики полезного сигнала и помехи, однако эти значения можно найти численными методами поиска минимума функции по двум переменным.
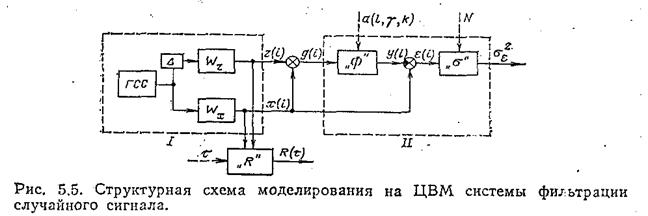
2. Описание моделируемой системы. Работа проводится путем моделирования на ЦВМ системы, состоящей из следующих блоков (рис. 5.5).
1. Генератор входного сигнала I, включающий генератор случайного сигнала (ГСС) и два формирующих фильтра с заданными характеристиками Wx(iω) и Wz(iω), на выходе которых получают полезный сигнал x(t) и помеху z(t). Между генератором случайного сигнала и формирующим фильтром Wz включено звено запаздывания Δ, обеспечивающее сдвиг на два-три такта. При этом вход фильтра, формирующего помехи, и вход фильтра, формирующего полезный сигнал, оказываются некоррелированными друг с другом.

2. Блок расчета корреляционных функций .
3. Блок фильтрации (II), включающий собственно фильтр и блок расчета погрешности фильтрации .
Генерируемые в системе полезный сигнал x(t) и помеха z(t) являются стационарными случайными процессами, корреляционные функции которых могут быть приближенно аппроксимированы экспонентами вида (рис. 5.6)
(5.6)

где
Оценки дисперсий сигналов и рассчитывают с помощью блока (при τ = 0); параметры α и αz задаются преподавателем.
3. Дискретная реализация непрерывных фильтров. В работе используют дискретные реализации описанных выше непрерывных фильтров. Шаг дискретности to принимают существенно меньше, чем время затухания корреляционных функций полезного сигнала и шума. Поэтому записанные выше выражения (5.1) для подсчета σε через спектральные характеристики входного сигнала и шума могут быть использованы и в дискретном случае.
Найдем сначала дискретные аналоги фильтров, формирующих из сигнала, получаемого от ГСС, случайные процессы с корреляционными функциями (5.6). Спектральные плотности, соответствующие этим корреляционным функциям, имеют вид
(5.7)
Передаточные функции формирующих фильтров для случая, когда дисперсия сигнала на выходе ГСС равна единице, равны


Нетрудно видеть, что


Если сигнал на входе каждого из формирующих фильтров обозначить через ξ, то дифференциальные уравнения, соответствующие передаточным функциям, записанным выше, имеют вид


Соответствующие им разностные аналоги запишутся в виде ;


Таким образом, алгоритм работы фильтра, формирующего, полезный сигнал, имеет вид:

(5.8a)
Аналогично для фильтра, формирующего помехи

(5.8б)
Аналоги непрерывных фильтров, предназначенных для выделения помехи, имеют следующий вид:
для фильтра скользящего среднего

(5.9)
где величину l выбирают из условия (l + 1)tо = T;
для экспоненциального фильтра

(5.10)
для статистического фильтра нулевого порядка
Порядок выполнения. 1. Составить и отладить подпрограммы блока фильтрации текущей информации и вычисления погрешностей фильтрации.
2. Получить реализации случайных процессов на выходе формирующих фильтров и по ним найти оценки дисперсий полезного сигнала и помех, а также корреляционных функций Rx(τ) и Rz(τ). Приближенно определить αх и αz и сравнить с расчетными.

3. Рассчитать по Sx(ω) и Sz(ω) аналитически или на ЦВМ нижнюю оценку для среднеквадратичной ошибки фильтрации.
4. По формуле (5.4) найти оптимальный коэффициент усиления статистического фильтра нулевого порядка и соответствующее ему значение , которое сравнивается с .

5. Использую один из известных методов поиска минимума функции двух переменных и составленную заранее программу, найти оптимальные параметры скользящего среднего и экспоненциального фильтров и среднеквадратичные ошибки фильтрации. При этом конкретному сочетанию параметров фильтра соответствует спектральная плотность ошибки Sε(ω), определяемая формулой (5.1), а по ней находят значение после численного интегрирования.
6. Ввести в ЦВМ программы фильтрации, определить экспериментально среднеквадратичную ошибку для оптимальных и отличных от оптимальных параметров фильтров, сравнить результаты с расчетными.
7. Провести сравнительный анализ эффективности различных алгоритмов фильтрации по следующим показателям: а) минимально достижимая среднеквадратичная ошибка.; б) требуемый объем оперативной памяти; в) время счета на ЦВМ.
Отчет должен содержать: 41) структурную схему системы (см. рис. 5.5); 2) подпрограммы формирующих и синтезируемых фильтров;. 3) расчет оптимальных параметров фильтров и соответствующих им значений среднеквадратичной погрешности; 4) результаты анализа рассмотренных алгоритмов и выводы.
Роль химии в жизни человека: Химия как компонент культуры наполняет содержанием ряд фундаментальных представлений о.
В этом подразделе рассматривается наиболее простой случай оптимальной линейной фильтрации.
Пусть сигнал на входе линейного фильтра представляет собой сумму переданного сигнала S(t) и помехи ξ(t)
x(t) = S(t) + ξ(t).
Требуется найти такую передаточную характеристику K(ω), которая минимизирует средний квадрат погрешности

, (18.8)
где – оценка сигнала на выходе фильтра. Здесь, считаем, что время запаздывания сигнала в фильтре τz = 0, а среднее значение берется по ансамблям сигналов S(t) и помех ξ(t). Считаем также, что S(t) и ξ(t) стационарные взаимно-некоррелированные процессы с известными спектрами плотности мощности Gs(ω) и Gξ(ω). Для отклика сигнала на выходе фильтра запишем
y(t) = L[S(t) + ξ(t)],
где L[-] – оператор линейного преобразования.
Среднеквадратическую погрешность (18.8) можно представить двумя составляющими

,
где – составляющая, обусловленная искажениями сигнала в фильтре (считаем ФЧХ линейной, т.е. φ(ω) = -ωτz); –составляющая, обусловленная действием шума.
Принимая во внимание, что

,

для спектральной плотности мощности имеем

.

В свою очередь, спектральная плотность мощности составляющей шума равна а для Gε(ω) суммарной погрешности получим

. (18.9)
Найдем теперь выражение K(ω) – при котором суммарная погрешность становится минимальной:

,

, (18.10)

. (18.11)
Фильтр (18.11), обеспечивающий минимальную среднеквадратичную погрешность случайного сигнала на фоне белого шума называется оптимальным фильтром Колмогорова-Винера. Следует отметить, что фильтр Колмогорова-Винера с коэффициентом передачи (18.11) физически не реализуем.

, (18.12)
Рассмотрим случай линейной фильтрации, когда наблюдаемый процесс на входе фильтра задан уравнением наблюдения
x(t) = S(t, a(t)) + ξ(t) = a(t) f(t) + ξ(t),

Принимая во внимание основное условие линейной оптимальной фильтрации, состоящее в том, чтоб ошибка должна быть не коррелированна со входным сигналом x(t), рекурентное соотношение, имеет вид:

(18.13)

(18.14)

Уравнения (18.13) и (18.14) принято называть уравнениями фильтра Калмана. Уравнение (18.13) определяет алгоритм формирования оценки, а, следовательно, и структурную схему фильтра, а (18.14) – ошибку фильтрации .
Структурная схема, моделирующая уравнение (18.13) приведена на рисунке 18.4. Этот фильтр представляет собой динамическую систему с переменным коэффициентом усиления, величина которого зависит от точности текущих оценок (дисперсии погрешности фильтрации) и уровня шумов наблюдения. Иначе говоря, фильтр Калмана можно рассматривать как линейную следящую систему, эффективная полоса пропускания которой, изменяется в процессе работы.

Рис. 18.4. Структурная схема, моделирующая уравнение 18.13
Устройство или процесс, который удаляет нежелательные компоненты или функции из сигнала или усиливает желаемые, или и то, и другое.
В обработке сигналов , A - фильтр представляет собой устройство или процесс , который удаляет некоторые нежелательные компоненты или функции от сигнала . Фильтрация - это класс обработки сигнала , определяющей особенностью фильтров которого является полное или частичное подавление некоторого аспекта сигнала. Чаще всего это означает удаление некоторых частот или полос частот. Однако фильтры не действуют исключительно в частотной области ; особенно в области обработки изображений существует много других целей для фильтрации. Корреляции могут быть удалены для определенных частотных компонентов, но не для других, без необходимости действовать в частотной области. Фильтры широко используются в электронике и телекоммуникациях , в радио , телевидении , звукозаписи , радарах , системах управления , синтезе музыки , обработке изображений и компьютерной графике .
Существует множество различных основ классификационных фильтров, и они по-разному пересекаются; не существует простой иерархической классификации. Фильтры могут быть:
- нелинейный или линейный
- изменяющийся вовремени или инвариантный во времени , также известный как инвариантность сдвига. Если фильтр работает в пространственной области, то характеристикой является пространственная инвариантность.
- причинный или непричинный: фильтр не является причинным, если его текущие выходные данные зависят от будущих входных данных. Фильтры, обрабатывающие сигналы временной области в реальном времени, должны быть причинными, но не фильтры, действующие на сигналы пространственной области или обработку сигналов временной области с отложенным временем.
- аналоговый или цифровой
- дискретное время (выборка) или непрерывное время
- пассивный или активный тип непрерывного фильтра
- Тип дискретного или цифрового фильтра с бесконечной импульсной характеристикой (БИХ) или конечной импульсной характеристикой (КИХ).
СОДЕРЖАНИЕ
Линейные фильтры с непрерывным временем
Современная методология проектирования линейных фильтров с непрерывным временем называется сетевым синтезом . Вот некоторые важные семейства фильтров, разработанные таким образом:
- Фильтр Чебышева , имеет наилучшее приближение к идеальному отклику любого фильтра для указанного порядка и пульсации.
- Фильтр Баттерворта , имеет максимально ровную АЧХ.
- Фильтр Бесселя имеет максимально плоскую фазовую задержку .
- Эллиптический фильтр имеет самое крутое отсечение из всех фильтров для указанного порядка и пульсации.
Разница между этими семействами фильтров состоит в том, что все они используют разные полиномиальные функции для приближения к идеальному отклику фильтра . Это приводит к тому, что каждый из них имеет различную передаточную функцию .
- Постоянный k-фильтр , оригинальная и простейшая форма волнового фильтра.
- Фильтр на основе m , модификация постоянной k с улучшенной крутизной среза и согласованием импеданса .
Терминология
Некоторые термины, используемые для описания и классификации линейных фильтров:
- Амплитудно-частотную характеристику можно разделить на несколько различных полос частот, описывающих, какие полосы частот пропускает фильтр ( полоса пропускания ), а какие отклоняет ( полоса задерживания ):
- Фильтр низких частот - низкие частоты пропускаются, высокие - приглушаются.
- Фильтр высоких частот - высокие частоты пропускаются, низкие частоты приглушаются.
- Полосовой фильтр - пропускаются только частоты в полосе частот.
- Полосовой фильтр или режекторный фильтр - ослабляются только частоты в полосе частот.
- Режекторный фильтр - отклоняет только одну конкретную частоту - крайний полосовой фильтр.
- Гребенчатый фильтр - имеет несколько равномерно расположенных узких полос пропускания, придающих полосе вид гребенки.
- Пропускной фильтр - пропускаются все частоты, но изменяется фаза выхода.
Для многоуровневых и многофазных систем цифровой модуляции требуются фильтры с плоской фазовой задержкой - линейной фазой в полосе пропускания - для сохранения целостности импульса во временной области, что дает меньше межсимвольных помех, чем другие типы фильтров.
С другой стороны, аналоговые аудиосистемы , использующие аналоговую передачу, могут допускать гораздо большие колебания фазовой задержки , и поэтому разработчики таких систем часто сознательно жертвуют линейной фазой, чтобы получить фильтры, которые лучше в других отношениях - лучшее подавление полосы задерживания, меньшая амплитуда полосы пропускания. рябь, более низкая стоимость и т. д.
Технологии
Фильтры могут быть построены по разным технологиям. Одна и та же передаточная функция может быть реализована несколькими способами, то есть математические свойства фильтра одинаковы, но физические свойства совершенно разные. Часто компоненты в различных технологиях прямо аналогичны друг другу и выполняют одну и ту же роль в своих соответствующих фильтрах. Например, резисторы, катушки индуктивности и конденсаторы электроники соответствуют амортизаторам, массам и пружинам в механике. Точно так же есть соответствующие компоненты в фильтрах с распределенными элементами .
- Электронные фильтры изначально были полностью пассивными и состояли из сопротивления, индуктивности и емкости. Активная технология упрощает проектирование и открывает новые возможности в спецификациях фильтров.
- Цифровые фильтры работают с сигналами, представленными в цифровой форме. Суть цифрового фильтра заключается в том, что он напрямую реализует математический алгоритм, соответствующий желаемой передаточной функции фильтра, в его программном коде или микрокоде.
- Механические фильтры состоят из механических компонентов. В подавляющем большинстве случаев они используются для обработки электронного сигнала, а преобразователи предназначены для преобразования его в механическую вибрацию и обратно. Однако существуют примеры фильтров, которые были разработаны для работы исключительно в механической области.
- Фильтры с распределенными элементами состоят из компонентов, состоящих из небольших отрезков линии передачи или других распределенных элементов . В фильтрах с распределенными элементами есть структуры, которые напрямую соответствуют сосредоточенным элементам электронных фильтров, а также другие, уникальные для этого класса технологий.
- Волноводные фильтры состоят из компонентов волновода или компонентов, вставленных в волновод. Волноводы - это класс линий передачи, и многие структуры фильтров с распределенными элементами, например шлейф , также могут быть реализованы в волноводах.
- Изначально оптические фильтры были разработаны для целей, отличных от обработки сигналов, таких как освещение и фотография. Однако с развитием волоконно-оптических технологий оптические фильтры все чаще используются для обработки сигналов, и терминология фильтров обработки сигналов, такая как longpass и shortpass , входит в эту область.
- Поперечный фильтр или фильтр линии задержки работает путем суммирования копий входного сигнала после различных задержек по времени. Это может быть реализовано с помощью различных технологий, включая аналоговые линии задержки , активные схемы, линии задержки CCD , или полностью в цифровой области.
Цифровые фильтры
Общий фильтр с конечной импульсной характеристикой с n ступенями, каждый с независимой задержкой, d i, и коэффициентом усиления, a i .
Цифровая обработка сигналов позволяет создавать недорогие фильтры для широкого диапазона. Сигнал дискретизируется, и аналого-цифровой преобразователь превращает сигнал в поток чисел. Компьютерная программа, работающая на CPU или специализированном DSP (или, реже, на аппаратной реализации алгоритма ) вычисляет поток выходных чисел. Этот выходной сигнал можно преобразовать в сигнал, пропустив его через цифро-аналоговый преобразователь . Существуют проблемы с шумом, вносимым преобразованиями, но их можно контролировать и ограничивать для многих полезных фильтров. Из-за задействованной выборки входной сигнал должен иметь ограниченную частоту, иначе возникнет наложение спектров .
Кварцевые фильтры и пьезоэлектрики
![]()
Фильтры на ПАВ
Фильтры на ПАВ ( поверхностные акустические волны ) - это электромеханические устройства, обычно используемые в радиочастотных приложениях. Электрические сигналы преобразуются в механическую волну в устройстве, построенном из пьезоэлектрического кристалла или керамики; эта волна задерживается по мере распространения по устройству, прежде чем будет преобразована обратно в электрический сигнал другими электродами . Задержанные выходы повторно комбинируются для получения прямой аналоговой реализации фильтра с конечной импульсной характеристикой . Этот метод гибридной фильтрации также можно найти в аналоговом фильтре с дискретизацией . Фильтры на ПАВ ограничены частотами до 3 ГГц. Фильтры были разработаны профессором Тедом Пейджем и другими.
BAW фильтры
Фильтры BAW (объемные акустические волны) представляют собой электромеханические устройства. Фильтры BAW могут реализовывать лестничные или решетчатые фильтры. Фильтры BAW обычно работают на частотах от 2 до 16 ГГц и могут быть меньше или тоньше, чем эквивалентные фильтры на ПАВ. Два основных варианта фильтров BAW находят свое применение в устройствах: объемный тонкопленочный акустический резонатор или FBAR и объемный акустический резонатор (SMR).
Гранатовые фильтры
Другой метод фильтрации на микроволновых частотах от 800 МГц до примерно 5 ГГц заключается в использовании синтетической монокристаллической сферы железо-иттриевого граната, изготовленной из химической комбинации иттрия и железа (YIGF, или фильтр из железо-иттриевого граната). Гранат находится на металлической полосе, управляемой транзистором , а небольшая рамочная антенна касается вершины сферы. Электромагнит изменяет частоту , что гранат будет проходить. Преимущество этого метода заключается в том, что гранат можно настраивать на очень широкую частоту, изменяя силу магнитного поля .
Атомные фильтры
Для еще более высоких частот и большей точности необходимо использовать колебания атомов. Атомные часы используют цезиевые мазеры в качестве фильтров сверхвысокой добротности для стабилизации своих первичных генераторов. Другой метод, используемый на высоких фиксированных частотах с очень слабыми радиосигналами, заключается в использовании рубиновой мазерной линии задержки с ответвлениями.
Передаточная функция
Передаточная функция фильтра представляет собой отношение выходного сигнала к входному сигналу в зависимости от комплексной частоты : ЧАС ( s ) Y ( s ) Икс ( s ) s
с . s знак равно σ + j ω
Для фильтров, состоящих из дискретных компонентов ( сосредоточенных элементов ):
- Их передаточная функция будет отношением многочленов от , т. Е. Рациональной функцией от . Порядком передаточной функции будет наивысшая степень полинома в числителе или знаменателе. s s s
- Все полиномы передаточной функции будут иметь действительные коэффициенты. Следовательно, полюсы и нули передаточной функции будут либо действительными, либо входить в комплексно-сопряженные пары.
- Поскольку фильтры считаются стабильными, действительная часть всех полюсов (то есть нули знаменателя) будет отрицательной, то есть они будут лежать в левой полуплоскости в комплексном частотном пространстве.
Фильтры с распределенными элементами , как правило, не имеют передаточных функций рациональных функций, но могут их аппроксимировать.
Построение передаточной функции включает преобразование Лапласа , и поэтому необходимо принять нулевые начальные условия, потому что
А когда f (0) = 0, мы можем избавиться от констант и использовать обычное выражение
Альтернативой передаточным функциям является представление поведения фильтра как свертки входного сигнала временной области с импульсной характеристикой фильтра . Теорема свертки , которая верна для преобразований Лапласа, гарантирует эквивалентность с передаточными функциями.
Классификация
Некоторые фильтры могут быть заданы семейством и формой полосы. Семейство фильтров определяется используемым аппроксимирующим полиномом, и каждый из них приводит к определенным характеристикам передаточной функции фильтра. Вот некоторые общие семейства фильтров и их особенности:
- Фильтр Баттерворта - отсутствие пульсаций усиления в полосе пропускания и полосе заграждения, медленная отсечка
- Фильтр Чебышева (Тип I) - без пульсаций усиления в полосе заграждения, умеренная отсечка
- Фильтр Чебышева (Type II) - без пульсаций усиления в полосе пропускания, умеренная обрезка
- Фильтр Бесселя - без пульсаций групповой задержки , без пульсаций усиления в обеих полосах, медленная отсечка усиления
- Эллиптический фильтр - усиление пульсаций в полосе пропускания и стопа, быстрое срезание
- Гауссов фильтр - отсутствие пульсации в ответ на ступенчатую функцию
Вот изображение, на котором сравниваются фильтры Баттерворта, Чебышева и эллиптические фильтры. Все фильтры на этом рисунке представляют собой фильтры нижних частот пятого порядка. Конкретная реализация - аналоговая или цифровая, пассивная или активная - не имеет значения; их результат будет таким же. Как видно из изображения, эллиптические фильтры резче других, но они показывают рябь по всей полосе пропускания.
Любое семейство можно использовать для реализации определенной формы полосы частот, в которой передаются частоты и которые за пределами полосы пропускания более или менее ослабляются. Передаточная функция полностью определяет поведение линейного фильтра, но не конкретную технологию, используемую для его реализации. Другими словами, существует ряд различных способов достижения определенной передаточной функции при проектировании схемы. Конкретный bandform фильтра может быть получен путем преобразования в виде фильтра - прототипа этого семейства.
Согласование импеданса
Структуры согласования импеданса неизменно принимают форму фильтра, то есть сети недиссипативных элементов. Например, в реализации пассивной электроники это, вероятно, будет иметь форму лестничной топологии катушек индуктивности и конденсаторов. Конструкция согласующих сетей имеет много общего с фильтрами, и конструкция неизменно будет иметь фильтрующее действие как случайное последствие. Хотя основная цель согласующей сети не состоит в фильтрации, часто бывает так, что обе функции объединяются в одной схеме. Необходимость согласования импеданса не возникает, пока сигналы находятся в цифровой области.
Аналогичные комментарии можно сделать относительно делителей мощности и направленных ответвителей . При реализации в формате с распределенными элементами эти устройства могут принимать форму фильтра с распределенными элементами . Необходимо согласовать четыре порта, и для расширения полосы пропускания требуются структуры, подобные фильтрам. Верно и обратное: фильтры с распределенными элементами могут иметь форму связанных линий.
Читайте также:
