
Какие функции осуществляют сау
Обновлено: 10.05.2024
Цель занятия:Изучение понятий автоматизированной системы управления (АСУ) и системы автоматического управления (САУ), задач, целей и функций АСУ и САУ с использованием ресурсов глобальной сети Интернет.
Пояснение к занятию
Автоматизированная система управления (АСУ) и система автоматического управления (САУ) — комплекс аппаратных и программных средств, предназначенный для управления различными процессами в рамках технологического процесса, производства, предприятия.
Автоматизированные системы управления (АСУ)
АСУ применяются в различных отраслях промышленности, энергетике, транспорте и т. п. Термин автоматизированная, в отличие от термина автоматическая подчёркивает сохранение за человеком-оператором некоторых функций, либо наиболее общего, целеполагающего характера, либо не поддающихся автоматизации. АСУ с Системой поддержки принятия решений (СППР), являются основным инструментом повышения обоснованности управленческих решений.
Создателем первых АСУ в СССР является доктор экономических наук, профессор, член-корреспондент Национальной академии наук Белоруссии, основоположник научной школы стратегического планирования Николай Иванович Ведута (1913—1998). В 1962—1967 гг. в должности директора Центрального научно-исследовательского института технического управления (ЦНИИТУ), являясь также членом коллегии Министерства приборостроения СССР, он руководил внедрением первых в стране автоматизированных систем управления производством на машиностроительных предприятиях. Активно боролся против идеологических PR-акций по внедрению дорогостоящих ЭВМ, вместо создания настоящих АСУ для повышения эффективности управления производством.
Важнейшая задача АСУ - повышение эффективности управления объектом на основе роста производительности труда и совершенствования методов планирования процесса управления. Различают АСУ объекты (технологическими процессами-АСУТП, предприятием-АСУП, отраслью-ОАСУ) и функциональные автоматизированные системы, например, проектирование плановых расчётов, материально-технического снабжения и т.д.
Цели автоматизации управления
В общем случае, систему управления можно рассматривать в виде совокупности взаимосвязанных управленческих процессов и объектов. Обобщенной целью автоматизации управления является повышение эффективности использования потенциальных возможностей объекта управления. Таким образом, можно выделить ряд целей:
1. Предоставление лицу, принимающему решение (ЛПР) релевантных данных для принятия решений
2. Ускорение выполнения отдельных операций по сбору и обработке данных
3. Снижение количества решений, которые должно принимать ЛПР
4. Повышение уровня контроля и исполнительской дисциплины
5. Повышение оперативности управления
6. Снижение затрат ЛПР на выполнение вспомогательных процессов
7. Повышение степени обоснованности принимаемых решений
Состав АСУ
В состав АСУ входят следующие виды обеспечений: информационное, программное, техническое, организационное, метрологическое, правовое и лингвистическое.
Основные классификационные признаки
Основными классификационными признаками, определяющими вид АСУ, являются:
§ сфера функционирования объекта управления (промышленность, строительство, транспорт, сельское хозяйство, непромышленная сфера и т.д.)
§ вид управляемого процесса (технологический, организационный, экономический и т.д.);
§ уровень в системе государственного управления, включения управление народным хозяйством в соответствии с действующими схемами управления отраслями (для промышленности: отрасль (министерство), всесоюзное объединение, всесоюзное промышленное объединение, научно-производственное объединение, предприятие (организация), производство, цех, участок, технологический агрегат).
Функции АСУ
Функции АСУ устанавливают в техническом задании на создание конкретной АСУ на основе анализа целей управления, заданных ресурсов для их достижения, ожидаемого эффекта от автоматизации и в соответствии со стандартами, распространяющимися на данный вид АСУ. Каждая функция АСУ реализуется совокупностью комплексов задач, отдельных задач и операций. Функции АСУ в общем случае включают в себя следующие элементы (действия):
§ планирование и (или) прогнозирование;
§ учет, контроль, анализ;
§ координацию и (или) регулирование.
Необходимый состав элементов выбирают в зависимости от вида конкретной АСУ. Функции АСУ можно объединять в подсистемы по функциональному и другим признакам.
Функции при формировании управляющих воздействий
§ Функции обработки информации (вычислительные функции) – осуществляют учет, контроль, хранение, поиск, отображение, тиражирование, преобразование формы информации;
§ Функции обмена (передачи) информации – связаны с доведением выработанных управляющих воздействий до ОУ и обменом информацией с ЛПР;
§ Группа функций принятия решения (преобразование содержания информации) – создание новой информации в ходе анализа, прогнозирования или оперативного управления объектом
Классы структур АСУ
В сфере промышленного производства с позиций управления можно выделить следующие основные классы структур систем управления: децентрализованную, централизованную, централизованную рассредоточенную и иерархическую.
Децентрализованная структура
Построение системы с такой структурой эффективно при автоматизации технологически независимых объектов управления по материальным, энергетическим, информационным и другим ресурсам. Такая система представляет собой совокупность нескольких независимых систем со своей информационной и алгоритмической базой.
Для выработки управляющего воздействия на каждый объект управления необходима информация о состоянии только этого объекта.
Централизованная структура
Централизованная структура осуществляет реализацию всех процессов управления объектами в едином органе управления, который осуществляет сбор и обработку информации об управляемых объектах и на основе их анализа в соответствии с критериями системы вырабатывает управляющие сигналы. Появление этого класса структур связано с увеличением числа контролируемых, регулируемых и управляемых параметров и, как правило, с территориальной рассредоточенностью объекта управления.
Достоинствами централизованной структуры являются достаточно простая реализация процессов информационного взаимодействия; принципиальная возможность оптимального управления системой в целом; достаточно легкая коррекция оперативно изменяемых входных параметров; возможность достижения максимальной эксплуатационной эффективности при минимальной избыточности технических средств управления.
Недостатки централизованной структуры следующие: необходимость высокой надежности и производительности технических средств управления для достижения приемлемого качества управления; высокая суммарная протяженность каналов связи при наличии территориальной рассредоточенности объектов управления.
Централизованная рассредоточенная структура
Основная особенность данной структуры — сохранение принципа централизованного управления, т.е. выработка управляющих воздействий на каждый объект управления на основе информации о состояниях всей совокупности объектов управления. Некоторые функциональные устройства системы управления являются общими для всех каналов системы и с помощью коммутаторов подключаются к индивидуальным устройствам канала, образуя замкнутый контур управления.
Алгоритм управления в этом случае состоит из совокупности взаимосвязанных алгоритмов управления объектами, которые реализуются совокупностью взаимно связанных органов управления. В процессе функционирования каждый управляющий орган производит прием и обработку соответствующей информации, а также выдачу управляющих сигналов на подчиненные объекты. Для реализации функций управления каждый локальный орган по мере необходимости вступает в процесс информационного взаимодействия с другими органами управления. Достоинства такой структуры: снижение требований, к производительности и надежности каждого центра обработки и управления без ущерба для качества управления; снижение суммарной протяженности каналов связи.
Недостатки системы в следующем: усложнение информационных процессов в системе управления из-за необходимости обмена данными между центрами обработки и управления, а также корректировка хранимой информации; избыточность технических средств, предназначенных для обработки информации; сложность синхронизации процессов обмена информацией.
Иерархическая структура
С ростом числа задач управления в сложных системах значительно увеличивается объем переработанной информации и повышается сложность алгоритмов управления. В результате осуществлять управление централизованно невозможно, так как имеет место несоответствие между сложностью управляемого объекта и способностью любого управляющего органа получать и перерабатывать информацию.
Кроме того, в таких системах можно выделить, следующие, группы задач, каждая из которых характеризуется соответствующими требованиями по времени реакции на события, происходящие в управляемом процессе:
задачи сбора данных с объекта управления и прямого цифрового управления (время реакции , секунды, доли секунды);
задачи экстремального управления, связанные с расчётами желаемых параметров управляемого процесса и требуемых значений уставок регуляторов, с логическими задачами пуска и остановки агрегатов и др. (время реакции — секунды, минуты);
задачи оптимизации и адаптивного управления процессами, технико-экономические задачи (время реакции — несколько секунд);
информационные задачи для административного управления, задачи диспетчеризации и координации в масштабах цеха, предприятия, задачи планирования и др. (время реакции — часы).
Кроме того, многие производственные системы имеют собственную иерархию, возникающую под влиянием объективных тенденций научно-технического прогресса, концентрации и специализации производства, способствующих повышению эффективности общественного производства. Чаще всего иерархическая структура объекта управления не совпадает с иерархией системы управления. Следовательно, по мере роста сложности систем выстраивается иерархическая пирамида управления. Управляемые процессы в сложном объекте управления требуют своевременного формирования правильных решений, которые приводили бы к поставленным целям, принимались бы своевременно, были бы взаимно согласованы. Каждое такое решение требует постановки соответствующей задачи управления. Их совокупность образует иерархию задач управления, которая в ряде случаев значительно сложнее иерархии объекта управления.
Виды АСУ
§ Автоматизированная система управления технологическим процессом или АСУ ТП — решает задачи оперативного управления и контроля техническими объектами в промышленности, энергетике, на транспорте.
§ Автоматизированная система управления производством (АСУ П) — решает задачи организации производства, включая основные производственные процессы, входящую и исходящую логистику. Осуществляет краткосрочное планирование выпуска с учётом производственных мощностей, анализ качества продукции, моделирование производственного процесса. Для решения этих задач применяются MIS и MES-системы, а также LIMS-системы.
§ Автоматизированная система управления дорожным движением или АСУ ДД — предназначена для управления транспортных средств и пешеходных потоков на дорожной сети города или автомагистрали
§ Автоматизированная система управления предприяти-ем или АСУП — для решения этих задач применяются MRP, MRP II и ERP-системы. В случае, если предприятием является учебное заведение, применяются системы управления обучением.
Наиболее важным аспектом при проектировании САУ для атомных станций является их классификация с учетом влияния САУ на безопасность АЭС в соответствии с требованиями ОПБ-88/97. По влиянию САУ как элемента АЭС, на безопасность устанавливаются четыре класса безопасности
САУ АЭС по влиянию на безопасность обычно классифицируют по классам: 2, 3 и 4. Классы безопасности 2 и 3 накладывают определенные требования к документации и проектированию САУ, а также к оценке соответствия оборудования, комплектующих, материалов и полуфабрикатов, поставляемых на АЭС [3]. Более подробно вопросы безопасности САУ АЭС рассмотрены в [4].
Все САУ и оборудование, используемые на АЭС, по своему назначению можно условно разделить на два вида:
- системы и оборудование, реализующие определенные транспортно-технологические операции, например машины, манипуляторы, краны, кантователи для хранения, транспортировки, преобразования и переработки ядерного топлива;
- системы, осуществляющие контроль, управление и информационную поддержку (получение, передача, обработка, хранение информации) в установках, реализующих ТП, например управления реакторной установки, химводоочистки, переработки жидких и твердых радиоактивных отходов.
При этом ТП могут содержать в себе признаки как первого, так и второго вида. Например, установка переработки жидких радиоактивных отходов содержит в себе ТП переработки отходов и транспортно-технологическую линию.
Также САУ классифицируют по характеру выполняемых ею функций, соответствующих ее основному назначению. При этом каждая из функций системы должна быть четко названа и описана и иметь ценность (например, функция диагностики позволяет пользователю своевременно выявлять отказавшие элементы САУ, что обеспечивает ведение ТП без ущерба для технологического оборудования, движущихся частей оборудования и т. п.). Таким образом, системы разделяют по их функциональному назначению, например на управляющие, информационные, системы безопасности и пр.
Многие САУ на АЭС являются системами, в которых реализация одной или двух функций является приоритетной задачей. Например, оборудование должно обеспечивать управление ТП, при этом такое управление должно быть безопасным. Таким образом, основными функциями САУ являются функции управления и безопасности (защит и блокировок). Однако это не значит, что в САУ не могут быть реализованы дополнительные функции — диагностическая, информационная, технического обслуживания, архивирования, обучения и др. В таких случаях дополнительные функции не должны влиять на основные функции САУ.
Еще одной особенностью САУ для АЭС является зависимость режима работы системы и технологического оборудования от режима работы энергоблока станции, например:
САУ переработки радиоактивных отходов имеет периодический режим работы, зависящий от количества накопленных отходов вне зависимости от режима работы энергоблока.
Система управления перегрузочной машиной работает во время планово-предупредительного ремонта (ППР) и остановленного энергоблока; при этом необходимо обеспечить кратчайшие, экономически более выгодные сроки перегрузочной операции.
Система автоматического регулирования защит турбины работает при работе энергоблока АЭС на мощности и остановлена во время ППР.
Так как сроки ППР (1–3 месяца в год) и работы энергоблока на мощности (9–11 месяцев в год) различны, то и требования к САУ, работающим в этих режимах, существенно отличаются.
Современные САУ, применяемые на АЭС, как правило, имеют распределенную структуру. Обычно выделяют три уровня:
- нижний — датчики, исполнительные механизмы и устройства связи с объектом;
- средний — оборудование автоматики, содержащее ПЛК и выполняющее непосредственно контроль и управление технологическим процессом;
- верхний — пульты управления, рабочие места операторов.
Рассмотрим подробнее основные элементы САУ.

ПЛК является ключевым элементом такой системы и, как правило, состоит из дублированных источников питания, дублированных (резервированных) процессорных модулей, интерфейсных модулей, коммуникационных процессоров и модулей входов/выходов. В ПЛК загружается программа управления ТП, защиты и блокировки, математические модели как самих объектов управления, так и пространственные модели зон обслуживания для транспортно-технологических объектов. На рис. 1 показан пример ПЛК на базе контроллера Siemens серии S7-300, широко использующегося в системах автоматического контроля АЭС (основные характеристики приведены в таблице 1).

Рабочие места операторов (РМО) таких систем обычно представляют собой персональный компьютер в промышленном исполнении (или панель управления) с установленной на нем операционной системой и специализированным программным обеспечением, с помощью которого может осуществляться конфигурирование САУ. РМО обычно разделяют на несколько типов в зависимости от назначения и разграничения прав доступа. Например, различают места операторов, технологов, начальников смены, инженеров-физиков, инженеров-химиков и других, контролирующих ведение ТП. Одни РМО позволяют выполнять только мониторинг, диагностику и отображение информации, другие — осуществлять управление ТП. Права доступа у операторов могут быть разные, но обычно они не имеют доступа к настройкам и управлению оборудованием, работа которого может повлиять на безопасность. У оператора имеется возможность только остановить работу системы или перевести ее в безопасное состояние при возникновении аварийных ситуаций.
Кроме РМО, в состав САУ включают сервисный ноутбук или инженерную станцию, позволяющие инженеру-программисту перепрограммировать ПЛК.
(САУ) - комплекс устройств, предназнач. для автоматич. изменения одного или неск. параметров объекта управления с целью установления требуемого режима его работы. САУ обеспечивает поддержание постоянства заданных значений регулируемых параметров или их изменение по заданному закону (системы стабилизации, программного управления, следящие системы) либо оптимизирует определ. критерий качества управления (системы экстрем. регулирования, оптим. управления). При значит. изменениях параметров объекта управления и хар-к возмущений и помех применяются самонастраивающиеся системы. Для осуществления цели управления с учётом особенностей управляемых объектов на них подаются управляющие воздействия, к-рые предназначены также для компенсации внеш. возмущающих воздействий, стремящихся нарушить норм. функционирование объекта. Управляющие воздействия вырабатываются устройством управления.
По типу управления САУ подразделяются на замкнутые, разомкнутые и комбинированные. Осн. тип САУ - замкнутые, в к-рых цепь прохождения сигналов образует замкнутый контур, включающий устройство управления и управляемый объект; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь вне зависимости от причин, вызвавших эта отклонения. Такое управление наз. управлением по отклонению. В разомкнутых САУ управление ведётся по жёсткой программе без анализа и учёта к.-л. факторов в процессе работы управляемого объекта - на устройство управления не поступают сигналы, несущие информацию о текущем состоянии объекта управления, иногда измеряются и компенсируются лишь главные из возмущений (помех). Такое управление наз. управлением по возмущению. В комбинированных САУ используются оба эти принципа управления (по отклонению и по возмущению). В САУ сложными технич. системами (напр., производств. и энергетич. комплексами, трансп. средствами) или технологич. процессами с большим числом регулируемых параметров широко применяются средства вычислит. техники - микропроцессоры, ЭВМ, управляющие машины.
Большой энциклопедический политехнический словарь . 2004 .
Полезное
Смотреть что такое "СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ" в других словарях:
система автоматического управления — Система управления, состоящая из автоматических приборов и других устройств, включая, возможно, средства вычислительной техники, выполняющая все установленные для нее функции, необходимые для управления процессом автоматически, т.е. без участия… … Справочник технического переводчика
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ — (САУ) совокупность взаимодействующих устройств управления и управляемого объекта, обеспечивающая достижение целей управления без вмешательства человека в соответствии с заданным алгоритмом. По принципу управления, положенному в основу САУ, их… … Большая политехническая энциклопедия
система автоматического управления — 3.10.55 система автоматического управления (САУ): Система локальной автоматики, функционирующая в автоматическом режиме, при котором функции управления или контроля осуществляются без участия производственного персонала (оперативного персонала… … Словарь-справочник терминов нормативно-технической документации
система автоматического управления — automatinio valdymo sistema statusas T sritis automatika atitikmenys: angl. automatic control system vok. automatisches Steuersystem, n rus. система автоматического управления, f pranc. système de commande automatique, m … Automatikos terminų žodynas
Система автоматического управления (САУ) — Система автоматического управления, в которой цель управления в статических и динамических режимах достигается посредством оптимизации замкнутых контуров регулирования Источник: Ценник 1: Электротехнические устройства Система автоматического… … Словарь-справочник терминов нормативно-технической документации
Система автоматического управления ГТД — совокупность устройств, автоматически обеспечивающих выполнение с требуемой точностью выбранных программ управления газотурбинным двигателем летательного аппарата на установившихся и переходных режимах его работы. С. а. у. ГТД выполняет следующие … Энциклопедия техники
Система автоматического управления компрессорной станции — осуществляет автоматическое регулирование производительности и давления компрессоров, определяемое изменяющимися потребностями сети, а также подстройку под оптимальный режим работы вспомогательного оборудования. Её использование, помимо… … Википедия
Система автоматического управления (САУ) — Система автоматического управления (САУ): комплекс средств микропроцессорной и вычислительной техники, осуществляющей автоматическое управление отдельным или группой оборудования, связанного техническим процессом. Источник: СТО… … Официальная терминология
САУ предназначены для решения основной задачи управления – достиженияопределённой цели. При этом весь процесс управления сводится к трем основным действиям:
1. - Получение информации о состоянии объекта управления (объекта автоматизации). При этом информация должна поступать непрерывно и с достаточно высокой точностью.
2. - Переработка этой информации для принятия решения на соответствующее управление объектом автоматизации, в зависимости от его состояния на данный момент времени.
3. - Передача информации в виде сигнала управления на объект автоматизации, чтобы осуществить на него необходимое определённое воздействие.
На рис.8.1 представлена обобщённая структура взаимосвязи САУ и объекта автоматизации, работа которого характеризуется, прежде всего, его выходными параметрами – хвых..
Рис.8.1. Структурная схема взаимосвязи объекта автоматизации
и системы автоматического управления
Здесь хвх - входная величина, представляющая собой требуемоеуправляющее воздействие, с помощью которого должна достигаться основная цель управления. При этом на объект автоматизации всегда может действовать какое-либо возмущающее воздействие - zв , изменяющее выходные параметры объекта.Следует заметить, что природа подобных воздействий часто зависит и от характера самого объекта автоматизации, а они могут быть как полезными, так и вредными. Поэтому система автоматического управления, в зависимости от входной величины и с учетом возмущающих воздействий, должна вырабатывать соответствующий сигнал управления – ху, закон изменения которого получил название алгоритм управления.
В теории САУ различают два класса алгоритма управления:
- детерминированный, т.е. наперед заданный определённой последовательностью и соответствующей программой алгоритм;
- информационный, т.е. переменный алгоритм управления в зависимости от окружающих условий работы объекта автоматизации. Этот класс более сложный и, очень часто используется совместно с электронными вычислительными машинами (ЭВМ).
Все системы автоматического управления делятся на следующие классификационные группы:
1. Системы оптимальные по быстродействию, в которых управление объектом осуществляется за минимально возможное время.
2. Системы программного управления, осуществляющие управление по заранее составленной определённой программе. При этом требуемая программа, чаще всего в настоящее время, задается в цифровом виде с помощью специального задающего устройства
3. Экстремальные системы, в которых управляемые параметры объекта выводятся на максимальные или минимальные значения и там удерживаются. В такие системы включается специальное устройство, которое определяет отклонение регулируемого параметра от экстремального значения и формирует в связи с этим соответствующий сигнал управления
4. Функциональные системы. В них управление объектом автоматизации осуществляется только при выполнении определённых, заранее заданных, функциональных зависимостей или предварительных расчётов.
Системы автоматического управления в зависимости от их структуры могут быть, прежде всего, разомкнутые,в которых нет контроля выходных параметров объекта автоматизации. В таких системах отсутствует обратная связь (ОС). Но в настоящее время наиболее широко применяются замкнутые системы автоматического управления.
В замкнутых системах автоматического управления осуществляется непрерывный контроль выходных параметров объекта автоматизации. Для этого в такие системы вводится обратная связь, представляющая собой, чаще всего, измерительную систему, т.е. систему контроля, которая по своей структуре может быть, в некоторых случаях, сложнее самой системы управления. Но при этом в замкнутых системах исключается влияние многих возмущающих воздействий, действующих на объект автоматизации.
Широко применяются системы автоматического управления в строительно-дорожных машинах с гидравлическим силовым приводом, некоторым из которых посвящен последний раздел настоящего учебного пособия
.Следует заметить, что структура систем автоматического регулирования, которым уделено внимание в следующем подразделе, подобна структуре систем управления. Для расчета и тех и других используется один и тот же математический аппарат и аналогичные методы исследования, но отличие этих систем друг от друга можно проследить на следующем графике (рис.8.2).
Рис. 8.2. Сравнительное назначение и отличие САУ и САР
Допустим, что какой-либо объект необходимо переместить из точки А в точку В. Это перемещение по соответствующей траектории, в зависимости от классификационной группы и выполняет система автоматического управления (САУ). Но после перемещения в точку В необходимо объект в этой точке удержать, и вот это удержание выполняется с помощью системы автоматического регулирования (САР).
Из этого следует, что системы автоматического управления более сложные, чем системы автоматического регулирования, так как их работа связана с более значительными перемещениями, как самого объекта, так и диапазона изменения его управляемых (или регулируемых) параметров.
Поскольку программа нашей дисциплины посвящена основам автоматики и автоматизации, остановимся в дальнейшем только на рассмотрении структуры систем автоматического регулирования, их устройству и работе применительно к конкретным условиям их применения.
8.2 Системы автоматического регулирования (САР)
Основное назначение САР заключается в поддержании выходных параметров объекта автоматизации на определенном заданном уровне или изменение этих параметров по определенному закону.
Как и системы автоматического управления системы регулирования бывают также разомкнутыми и замкнутыми, т.е. с элементами обратной связи и без них.
Так в разомкнутых системах регулирования для компенсации вредных возмущающих воздействий, действующих на объект автоматизации, часто используют специальные корректирующие устройства - КУ, подключаемые на вход системы согласно рис.8.3.
Рис. 8.3 Структура САР с корректирующим устройством
Здесь самый первый элемент на входе системы регулирования выполняет функции суммирующего устройства , которое вырабатывает сигнал х1, равный сумме входного сигнала хвх и сигнала, поступающего с корректирующего устройства. С учетом этого возмущающего воздействия и входного сигнала и САР вырабатывает соответствующий сигнал регулирования хр для дальнейшего воздействия на объект регулирования.
Но все возмущающие воздействия в разомкнутой системе скомпенсировать не удается. Поэтому большинство современных систем и регулирования и управления структурно строятся, в основном, замкнутыми, т.е. с использованием обратной связи – ОС (рис.8.4).
Рис.8.4. Структурная схема замкнутой САР
С помощью обратной связи в таких системах осуществляется постоянный контроль выходных параметров объекта управления или регулирования и вырабатывается соответствующий сигнал обратной связи хос, поступающийна элемент сравнения, где он непрерывно сравнивается с входной величиной хвх , поступающегос задающего устройства, и вырабатывается разностный сигнал ∆х = хвх – хос и, в соответствии с этим, сигналом хр система регулирования воздействует на объект автоматизации.
В некоторых случаях системы автоматического регулирования структурно строятся комбинированными, т.е. с компенсацией ошибок, в которых используются два принципа регулирования - по замкнутому и по разомкнутому циклу регулирования (рис.8.5).
Рис.8.5. Структурная схема комбинированной САР
Но такие системы более сложные, что требует кроме материальных затрат на их изготовление и более дорогое их обслуживание. Так на рис.8.6 представлена наиболее полная структура большинства систем автоматического регулирования и управления с функциональной взаимосвязью всех элементов, составляющих эти системы. Подобная, достаточно сложная, структура таких систем используется, чтобы обеспечить их устойчивость и более высокие показатели качества при эксплуатации.
РРис.8.6. Структурная схема систем автоматического
управления и регулирования
ЗУ – задающее устройство, с помощью которого устанавливается требуемое значение выходных параметров на объекте автоматизации ОА (управления или регулирования).
КУ1 – корректирующее устройство для компенсации возмущающего воздействия zв на объект автоматизации.
ИЭ – исполнительный элемент, оказывающий непосредственное воздействие на объект автоматизации.
ГОС – главная обратная связь, с помощью которой осуществляется постоянный контроль выходных параметров объекта автоматизации хвых.
У – усилитель, предназначенный для усиления сигнала х2..
МОС – местная обратная связь (параллельное корректирующее устройство) для улучшения качества используемого в системе усилителя.
КУ2 – последовательное корректирующее устройство для дополнительной обработки сигнала ошибки ∆х.
Однако, при дальнейшем рассмотрении систем автоматического регулирования (а также управления) за их основу примем более общую (ключевую) структурную схему (рис.8.7), составленную только из основных функциональных узлов, таких как: задающее устройство ЗУ, элемент сравнения ЭС, усилитель У, если он необходим,исполнительный элемент ИЭ и элемент обратной связи ОС.
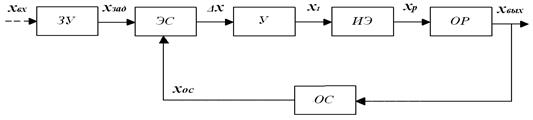
Рис.8.7. Структурная схема системы автоматического управления и регулирования, представленная только основными элементами.
В зависимости от назначения и работы все системы автоматического регулирования делятся на следующие три основные классификационные группы:
1. Системы автоматической стабилизации, в которых выходная величина на объекте автоматизации поддерживается постоянной.
2.Системы программного регулирования. В таких системах выходные параметры объекта автоматизации изменяются по заранее составленной программе. При этом сама программа может задаваться либо с помощью специальных копиров или чертежей, либо, чаще всего, в цифровом виде с использованием современных носителей информации.
3.Следящие системы, в которых закон изменения входной величины хвх, поступающей на вход задающего устройства, заранее неизвестен и может в процессе работы непрерывно изменяться в зависимости от окружающих условий. Но при этом система регулирования должна следить за этими изменениями и в соответствии с ними регулировать выходные параметры объекта автоматизации.
Перечисленная классификация систем автоматического регулирования, в конечном счёте, определяется характером задающего устройства, используемого в системе. Так в системах автоматической стабилизации задающее устройство вырабатывает постоянный по величине сигнал (хзад = const ).
В системах программного регулирования сигнал с задающего устройства изменяется ( х зад = var ), но по заранее составленной определенной программе.
В следящих системах величина заданного сигнала зависит от неизвестного по величине входного воздействия, поступающего на вход задающего устройства. А система регулирования, в результате, определяет это воздействие (т.е. отслеживает его) и вырабатывает соответствующий сигнал регулирования - хр в соответствии с законом изменения этого входного воздействия.
Читайте также: