
Как осуществлять процесс реверсирования двигателя постоянного тока
Обновлено: 02.07.2024
Чтобы двигатель постоянного тока начал вращаться, ему необходимо обеспечить нужное количество энергии. Как правило, для маломощных двигателей достаточно несколько ватт. Блок управления (микроконтроллер), который принимает решения о запуске двигателя, не может непосредственно управлять двигателем, то есть обеспечить необходимую мощность со своего вывода. Это связано с тем, что порты микроконтроллера имеют очень ограниченную нагрузочную способность (максимальный ток на выходе микроконтроллера обычно не более 20 мА).
Поэтому нужен усилитель мощности — устройство, которое может на своем выходе генерировать сигнал мощностью большей, чем мощность на его входе. Такими устройствами являются транзистор и реле, которые прекрасно подходят для управления двигателем постоянного тока.
Реверс двигателя постоянного тока схемы.
Устройство для реверса испытывалось с электродвигателем автомобильного вентилятора. Мощные МОП-транзисторы (для КП74ЗБ напряжение сток-затвор составляет 80 В. максимальный ток стока — 4,9 А) обеспечивают запас по мощности и по напряжению. Сопротивление открытого канала составляет 0,3.. .0,5 Ом. Для повышения эффективности VT1. . .VТ4 устанавливаются на теплоотводы. Напряжение питания зависит от типа применяемого электродвигателя М1. Если его напряжение питания превышает 15 В, следует предусмотреть в схеме дополнительный стабилизатор для питания микросхемы DD1. Вместо К561ЛА7 можно применить другую микросхему серии 561, если ее элементы обеспечивают инвертирование сигнала (К561ЛЕ5, К561ЛН2). Другая схема управления реверсом, построенная на мощных комплементарных полевых транзисторах, показана на рис.5 .
Управление двигателем при помощи биполярного транзистора
Самый простой способ приведения в действие двигателя показан ниже:
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.
Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора.
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора — это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:
Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:
Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Реверс электродвигателя — полное описание функций реверсирования
– это изменение направления вращения электродвигателя. Выполнить реверс можно изменив полярность приходящего на пускатель, питающего напряжения. Это могут быть регуляторы, используемые для двигателей постоянного тока.
Реверс можно выполнить, используя перемену чередования фаз в сети переменного тока. Это действие выполняется в автоматическом режиме при замене полярности сигнала задания, или после поступления определенной команды на нужный логический вход.
Реверс можно осуществить при помощи информации, которая передается по полевой шине, эта возможность входит в определенный набор стандартных функциональных способностей и свойственна большинству современных регуляторов, используемых в цепях переменного тока.
Рис№1. Тезус U(магнитный пускатель) с реверсивным блоком
Функция реверсирования
Для изменения направления двигателя изменяется полярность напряжения приходящего на якорь двигателя.
Основные методы реверсирования
В настоящее время, уже достаточно редко, используется контакторный способ.
Существует статический способ, он заключается в изменении полярности на выходе преобразователя в обмотке якоря или при изменении направления прохождения тока возбуждения. Для этого способа свойственно наличие большой постоянной времени обмотки возбуждения, что не всегда удобно.
Рис. №2. Реверсирование двигателя с помощью магнитного пускателя.
При управляемом торможении механизмов, обладающих высоким моментом инерции нагрузки, необходимо вырабатываемую электрической машиной энергию, возвращать обратно в основную электрическую сеть.
Используя процесс торможения регулятор выступает в качестве инвертора, производимая энергия обладает отрицательным зарядом.. таким образом регулятор может осуществить две операции одна – реверс, другая – рекуперативное торможение. Регулятор оснащается двумя мостами, которые подключены встречно-параллельно.
Используемые мосты инвертируют напряжение и ток.
Рис.№3. Реверс асинхронного электродвигателя с прямым частотным преобразователем; а) скорость и составляющие вектора статорных токов АД, б) фазные напряжения электрической сети и ток нагрузки.
Реверс может осуществляться преобразователем частоты, используемым для асинхронных электрических двигателей.
Управление реверсированием выполняется с помощью векторного управления в замкнутой системе с использованием датчика обратной связи. С его помощью производится независимое управление составляющими тока Id и Iq, они служат для определения потока и вращающегося момента двигателя. Управление асинхронным двигателем аналогично проведению операций по управлению и регулированию двигателем постоянного тока.
Рис.№4. Функциональная схема регулятора скорости с векторным управлением и датчиком обратной связи.
Для осуществления функции реверса, на логическом входе регулятора предназначенного для выполнения этой команды появляется внешний сигнал. Он изменяет порядок коммутации силовых ключей инвертора и реверса двигателя. Реверс можно выполнять в нескольких вариантах.
- Вариант №1: осуществление действия с помощью противовключения, при стремительном изменении очередности переключения транзисторных ключей
.
При изменении чередования фаз на двигателе, находящемся в работе, происходит изменение вращения поля. В результате этого появляется большое скольжение, что создает резко-нарастающее тока ПЧ (преобразователя частоты) до самого большого значения (внутреннее ограничение тока ПЧ). При большом скольжении малый тормозной момент и внутренний регулятор ПЧ уменьшат задание скорости. При достижении электродвигателем нулевой скорости, происходит осуществление реверса, который соответствует кривой разгона. Лишняя энергия, не затраченная на трение и на нагрузку, рассеивается в роторе.
- Вариант №2: изменение направления вращения электрического поля с управлением периода скорости замедления и без него.
Вращающий момент механизма прямо противоположен моменту двигателя и превышает его по модулю, то есть естественное замедление происходит быстрее во много раз, чем кривая замедления, которую установил регулятор. Значение скорости постепенно снижается и происходит смена направления вращения.
При вращающем моменте, когда естественное торможение меньше установленного регулятором, двигатель начинает работать в состоянии рекуперативного торможения и возвращает энергию преобразователю. Диодные мосты не дают энергии пройти в сеть, конденсаторы фильтра заряжаются, величина напряжения увеличивается и включается устройство безопасности, предохраняющее от выделения энергии.
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:
Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Реверсивное включение двигателей постоянного тока
Наиболее просто осуществить реверс двигателя постоянного тока, у которого статор с постоянными магнитами. Достаточно изменить полярность питания, чтобы ротор начал вращаться в обратную сторону.
Сложнее осуществить реверсирование мотора с электромагнитным возбуждением (последовательным, параллельным). Если просто поменять полярность питающего напряжения, то направление вращения ротора не изменится. Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора.
Для осуществления реверса двигателей большой мощности полярность следует менять на якоре. Разрыв обмотки возбуждения на работающем моторе может привести к неисправности, т.к. возникающая ЭДС имеет повышенное напряжение, которое способно повредить изоляцию обмоток. Что приведет к выходу электродвигателя из строя.
Для осуществления обратного направления вращения ротора применяют мостовые схемы на реле, контакторах или транзисторах. В последнем случае можно и регулировать скорость вращения.

На рисунке представлена схема на транзисторах. В качестве иллюстрации работы транзисторы заменены контактами переключателя. Аналогично выполняются мостовые схемы не на биполярных, а на полевых транзисторах.
КПД такой схемы значительно выше, чем на транзисторах. Управление осуществляется микроконтроллером или простыми логическими схемами, предотвращающими одновременную подачу сигналов.
Изменение направления вращения ротора асинхронного двигателя
Наибольшее распространение в промышленности получили асинхронные двигатели, запитанные от трехфазного напряжения 380 вольт. Для того чтобы осуществить реверс, достаточно поменять две любые фазы.

Схема применяется повсеместно и по сей день для подключения трехфазного двигателя в трехфазной сети. Простота схемного решения и доступность комплектующих — её весомые преимущества.
Наибольшее распространение находят электронные системы управления. Коммутационные схемы, которых собранные на тиристорах без пускателей. Хотя пускатели могут быть и установлены для дистанционного включения или выключения в этой цепи.
Схема подключения коллекторного двигателя с реверсом
Чтобы осуществить реверс коллекторного двигателя, необходимо знать:
- Не на каждом коллекторном моторе можно осуществить реверс. Если на корпусе указана стрелка вращения, то его нельзя применять в реверсивных устройствах.
- Все двигатели, имеющие высокие обороты предназначены для вращения в одну сторону. Например, у электродвигателя, устанавливаемого в болгарках.
- У двигателя, который имеет небольшие обороты, вращение может осуществляться в разные стороны. Такие моторы смонтированы в электроинструментах, например, электродрелях, шуруповертах, стиральных машинах и т.п.
На рисунке представлена схема универсального коллекторного двигателя, который может работать как от постоянного, так и переменного тока.

Чтобы изменилось вращение ротора, достаточно поменять полярность напряжения на обмотке ротора или статора, как и в двигателях постоянного тока, от которых универсальные машины практически не отличаются.
Если просто изменить полярность подводящего напряжения на коллекторном двигателе, направление вращения ротора не изменится. Это необходимо учитывать при подключении электродвигателя к сети.
Также следует знать, что в моторах большой мощности коммутируют обмотку якоря. При переключении обмоток статора возникает напряжение самоиндукции, которое достигает величин, способных вывести двигатель из строя.
Конструктора-любители в своих поделках применяют различные типы двигателей. Зачастую они используют щеточный электродвигатель от стиральной машинки автомат. Это удобные моторчики, которые можно подключать непосредственно к сети 220 вольт. Они не требуют дополнительных конденсаторов, а регулировку оборотов можно легко производить с помощью стандартного диммера. На клеммную колодку выводятся шесть или семь выводов.
Зависит от типа двигателя:
- Два идут на щетки коллектора.
- От таходатчика на колодку приходит пара проводов.
- Обмотки возбуждения могут иметь два или три провода. Третий служит для изменения скорости вращения.
Чтобы выполнить реверс двигателя от стиральной машины, следует поменять местами выводы обмотки возбуждения. Если имеется третий вывод, то его не используют.
Управление двигателем при помощи H-моста
Решения, которые мы привели до этого, имеют основной недостаток — с их помощью не возможно управлять двигателем в двух направлениях! Такая необходимость, скорее всего, нам пригодиться, например, при строительстве роботов. H-моста — это конструкция, которая может быть построена как из обоих типов транзисторов, как и с реле.
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
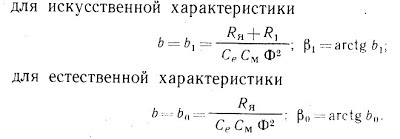
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
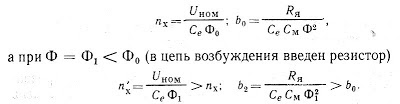
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
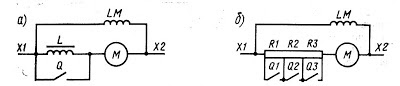
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
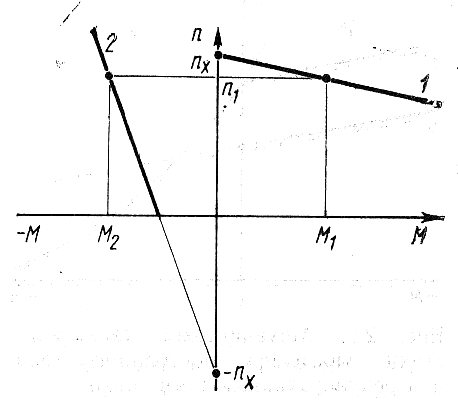
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
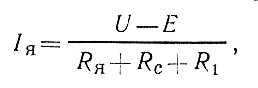
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
Устройство для реверса испытывалось с электродвигателем автомобильного вентилятора. Мощные МОП-транзисторы (для КП74ЗБ напряжение сток-затвор составляет 80 В. максимальный ток стока — 4,9 А) обеспечивают запас по мощности и по напряжению. Сопротивление открытого канала составляет 0,3.. .0,5 Ом. Для повышения эффективности VT1. . .VТ4 устанавливаются на теплоотводы. Напряжение питания зависит от типа применяемого электродвигателя М1. Если его напряжение питания превышает 15 В, следует предусмотреть в схеме дополнительный стабилизатор для питания микросхемы DD1. Вместо К561ЛА7 можно применить другую микросхему серии 561, если ее элементы обеспечивают инвертирование сигнала (К561ЛЕ5, К561ЛН2). Другая схема управления реверсом, построенная на мощных комплементарных полевых транзисторах, показана на рис.5 .


Реверс электродвигателя — полное описание функций реверсирования
– это изменение направления вращения электродвигателя. Выполнить реверс можно изменив полярность приходящего на пускатель, питающего напряжения. Это могут быть регуляторы, используемые для двигателей постоянного тока.
Реверс можно выполнить, используя перемену чередования фаз в сети переменного тока. Это действие выполняется в автоматическом режиме при замене полярности сигнала задания, или после поступления определенной команды на нужный логический вход.
Реверс можно осуществить при помощи информации, которая передается по полевой шине, эта возможность входит в определенный набор стандартных функциональных способностей и свойственна большинству современных регуляторов, используемых в цепях переменного тока.
Рис№1. Тезус U(магнитный пускатель) с реверсивным блоком
Функция реверсирования
Для изменения направления двигателя изменяется полярность напряжения приходящего на якорь двигателя.
Основные методы реверсирования
В настоящее время, уже достаточно редко, используется контакторный способ.
Существует статический способ, он заключается в изменении полярности на выходе преобразователя в обмотке якоря или при изменении направления прохождения тока возбуждения. Для этого способа свойственно наличие большой постоянной времени обмотки возбуждения, что не всегда удобно.
Рис. №2. Реверсирование двигателя с помощью магнитного пускателя.
При управляемом торможении механизмов, обладающих высоким моментом инерции нагрузки, необходимо вырабатываемую электрической машиной энергию, возвращать обратно в основную электрическую сеть.
Используя процесс торможения регулятор выступает в качестве инвертора, производимая энергия обладает отрицательным зарядом.. таким образом регулятор может осуществить две операции одна – реверс, другая – рекуперативное торможение. Регулятор оснащается двумя мостами, которые подключены встречно-параллельно.
Используемые мосты инвертируют напряжение и ток.
Рис.№3. Реверс асинхронного электродвигателя с прямым частотным преобразователем; а) скорость и составляющие вектора статорных токов АД, б) фазные напряжения электрической сети и ток нагрузки.
Реверс может осуществляться преобразователем частоты, используемым для асинхронных электрических двигателей.
Управление реверсированием выполняется с помощью векторного управления в замкнутой системе с использованием датчика обратной связи. С его помощью производится независимое управление составляющими тока Id и Iq, они служат для определения потока и вращающегося момента двигателя. Управление асинхронным двигателем аналогично проведению операций по управлению и регулированию двигателем постоянного тока.
Рис.№4. Функциональная схема регулятора скорости с векторным управлением и датчиком обратной связи.
Для осуществления функции реверса, на логическом входе регулятора предназначенного для выполнения этой команды появляется внешний сигнал. Он изменяет порядок коммутации силовых ключей инвертора и реверса двигателя. Реверс можно выполнять в нескольких вариантах.
- Вариант №1: осуществление действия с помощью противовключения, при стремительном изменении очередности переключения транзисторных ключей
.
При изменении чередования фаз на двигателе, находящемся в работе, происходит изменение вращения поля. В результате этого появляется большое скольжение, что создает резко-нарастающее тока ПЧ (преобразователя частоты) до самого большого значения (внутреннее ограничение тока ПЧ). При большом скольжении малый тормозной момент и внутренний регулятор ПЧ уменьшат задание скорости. При достижении электродвигателем нулевой скорости, происходит осуществление реверса, который соответствует кривой разгона. Лишняя энергия, не затраченная на трение и на нагрузку, рассеивается в роторе.
- Вариант №2: изменение направления вращения электрического поля с управлением периода скорости замедления и без него.
Вращающий момент механизма прямо противоположен моменту двигателя и превышает его по модулю, то есть естественное замедление происходит быстрее во много раз, чем кривая замедления, которую установил регулятор. Значение скорости постепенно снижается и происходит смена направления вращения.
При вращающем моменте, когда естественное торможение меньше установленного регулятором, двигатель начинает работать в состоянии рекуперативного торможения и возвращает энергию преобразователю. Диодные мосты не дают энергии пройти в сеть, конденсаторы фильтра заряжаются, величина напряжения увеличивается и включается устройство безопасности, предохраняющее от выделения энергии.
Принцип управления двигателем при помощи Arduino и драйвера L298N
Благодаря наличию в драйвере L298N встроенного моста данная плата позволяет осуществлять одновременное управление сразу двумя электрическими машинами от двух пар выводов. Логическая схема в данном устройстве работает от напряжения в 5В, а питание самих электрических машин можно осуществлять до 45В включительно. Максимально допустимый ток для одного канала платы составляет 2А.
Как правило, этот драйвер имеет модульное исполнение, за счет чего в комплект модуля уже включены рабочие элементы, выводы и разъемы, необходимые для передачи управляющих сигналов. Пример такого драйвера показан на рисунке ниже:

Пример драйвера L298N
Теперь разберем, как осуществляется управление двигателем с помощью драйвера L298N. Подключение двигателя производится к винтовым клеммным зажимам – по паре для питания каждого моторчика. Остальные клеммные зажимы предназначены для подачи питания плюс и минус, а также получения пониженного напряжения (на них подается определенный уровень питающего напряжения, от которого работают двигатели, а внутренний преобразователь понижает его до 5В для собственных логических цепей). Штекерные выводы платы осуществляют широтно-импульсную модуляцию при формировании рабочих сигналов.

Зажимы, куда подключать моторы
Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше. Этот выход можно использовать для запитки того же Ардуино или для любых других устройств, которые питаются от 5В.
Немаловажным моментом для получения 5В от этого клеммного вывода является установка черной перемычки, которая отвечает за преобразование отличного от 5 В уровня напряжения, при условии, что его уровень ниже 12В. Если уровень питающего напряжения выше 12В, перемычку необходимо снять, так как внутренний преобразователь на него не рассчитан, а сама плата должна запитываться от 5В через третий вывод этого же клеммника.
Реверсивное включение двигателей постоянного тока
Наиболее просто осуществить реверс двигателя постоянного тока, у которого статор с постоянными магнитами. Достаточно изменить полярность питания, чтобы ротор начал вращаться в обратную сторону.
Сложнее осуществить реверсирование мотора с электромагнитным возбуждением (последовательным, параллельным). Если просто поменять полярность питающего напряжения, то направление вращения ротора не изменится. Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора.
Для осуществления реверса двигателей большой мощности полярность следует менять на якоре. Разрыв обмотки возбуждения на работающем моторе может привести к неисправности, т.к. возникающая ЭДС имеет повышенное напряжение, которое способно повредить изоляцию обмоток. Что приведет к выходу электродвигателя из строя.
Для осуществления обратного направления вращения ротора применяют мостовые схемы на реле, контакторах или транзисторах. В последнем случае можно и регулировать скорость вращения.

На рисунке представлена схема на транзисторах. В качестве иллюстрации работы транзисторы заменены контактами переключателя. Аналогично выполняются мостовые схемы не на биполярных, а на полевых транзисторах.
КПД такой схемы значительно выше, чем на транзисторах. Управление осуществляется микроконтроллером или простыми логическими схемами, предотвращающими одновременную подачу сигналов.
Что представляет собой драйвер L298N?
Данная плата содержит микросхему и 15 выходов для генерации управляющих сигналов. Предназначено для передачи сигналов к рабочим элементам индуктивного типа – обмоткам двигателя, катушкам реле и т.д. Конструктивно L298N позволяет подключать в работу до двух таких элементов, к примеру, через нее можно одновременно управлять двумя шаговыми двигателями.
На схеме ниже приведен пример распределения выводов L298N от рабочей микросхемы.

L298N. Выводы
- Vss – вывод питания для логических цепей в 5В;
- GND – нулевой вывод (он же корпус);
- INPUT1, INPUT 2, INPUT 3, INPUT 4 – позволяют плавно наращивать и уменьшать скорость вращения двигателя;
- OUTPUT1, OUTPUT2 – выводы для питания первой индуктивной нагрузки;
- OUTPUT3, OUTPUT4 – выводы для питания второй индуктивной нагрузки;
- Vs – вывод для переключения питания;
- ENABLE A, B – выводы, при помощи которых осуществляется раздельное управление каналами, могут устанавливать активный и пассивный режим (с регулируемой скоростью вращения и с установленной);
- CURRENT SENSING A, B – выводы для установки текущего режима.
Изменение направления вращения ротора асинхронного двигателя
Наибольшее распространение в промышленности получили асинхронные двигатели, запитанные от трехфазного напряжения 380 вольт. Для того чтобы осуществить реверс, достаточно поменять две любые фазы.

Схема применяется повсеместно и по сей день для подключения трехфазного двигателя в трехфазной сети. Простота схемного решения и доступность комплектующих — её весомые преимущества.
Наибольшее распространение находят электронные системы управления. Коммутационные схемы, которых собранные на тиристорах без пускателей. Хотя пускатели могут быть и установлены для дистанционного включения или выключения в этой цепи.
Введение
Электрическая машина постоянного тока является одной из самых простых в эксплуатации, благодаря чему ее так часто применяют в устройствах радиоэлектроники и робототехники. Такая популярность обусловлена простотой питания и управления – для этого подаются два полюса от источника эдс (отрицательный и положительный), и при протекании тока по обмоткам происходит вращение вала. При смене полярности двигатель совершает реверсивное движение.
В системах радиоэлектроники такие способы управления работой двигателя получили название широтно-импульсной модуляции (ШИМ). Такой процесс характеризуется изменением продолжительности подаваемого напряжения или формы его сигнала.
Как можно изменять скорость вращения при помощи ШИМ?
Применяя способ ШИМ, вы производите попеременную подачу и отключение напряжения на обмотки двигателя с большой частотой. Частота импульсов при этом может достигать нескольких килогерц.
Величина среднего напряжения, подаваемого на двигатель, напрямую зависит от формы сигнала ШИМ . Форма сигнала, в свою очередь, определяется рабочим циклом, который можно представить в виде отношения времени подачи сигнала к общему периоду (сумме времени подачи напряжения и его отключения). В результате получается безразмерная величина, которую выражают в процентном отношении – сколько времени от общего периода напряжение подавалось на двигатель. В слаботочных системах на 5, 12, 24 или 36 В применяется цикл на 25%, 50%, 75% и 100%.

Широтно-импульсная модуляци
Схема подключения коллекторного двигателя с реверсом
Чтобы осуществить реверс коллекторного двигателя, необходимо знать:
- Не на каждом коллекторном моторе можно осуществить реверс. Если на корпусе указана стрелка вращения, то его нельзя применять в реверсивных устройствах.
- Все двигатели, имеющие высокие обороты предназначены для вращения в одну сторону. Например, у электродвигателя, устанавливаемого в болгарках.
- У двигателя, который имеет небольшие обороты, вращение может осуществляться в разные стороны. Такие моторы смонтированы в электроинструментах, например, электродрелях, шуруповертах, стиральных машинах и т.п.
На рисунке представлена схема универсального коллекторного двигателя, который может работать как от постоянного, так и переменного тока.

Чтобы изменилось вращение ротора, достаточно поменять полярность напряжения на обмотке ротора или статора, как и в двигателях постоянного тока, от которых универсальные машины практически не отличаются.
Если просто изменить полярность подводящего напряжения на коллекторном двигателе, направление вращения ротора не изменится. Это необходимо учитывать при подключении электродвигателя к сети.
Также следует знать, что в моторах большой мощности коммутируют обмотку якоря. При переключении обмоток статора возникает напряжение самоиндукции, которое достигает величин, способных вывести двигатель из строя.
Конструктора-любители в своих поделках применяют различные типы двигателей. Зачастую они используют щеточный электродвигатель от стиральной машинки автомат. Это удобные моторчики, которые можно подключать непосредственно к сети 220 вольт. Они не требуют дополнительных конденсаторов, а регулировку оборотов можно легко производить с помощью стандартного диммера. На клеммную колодку выводятся шесть или семь выводов.
Зависит от типа двигателя:
- Два идут на щетки коллектора.
- От таходатчика на колодку приходит пара проводов.
- Обмотки возбуждения могут иметь два или три провода. Третий служит для изменения скорости вращения.
Чтобы выполнить реверс двигателя от стиральной машины, следует поменять местами выводы обмотки возбуждения. Если имеется третий вывод, то его не используют.




К трехфазной сети

Руководствуясь представленной схемой легко составить последовательность, в которой должно производиться подключение электродвигателя. Первым делом устанавливается основной силовой автомат. Его номинальное напряжение и сила тока должны быть рассчитаны на те, которые будет потреблять двигатель. Только в этом случае можно быть уверенным в бесперебойной работе. Перед монтажом автомата для двигателя потребуется обесточить сеть. Следующим устанавливается предохранительный выключатель. После него фазный кабель уходит на разрыв, на кнопку стоп, а уже от нее делается подключение к контакторам. На каждом элементе контактора и кнопочного поста обычно делаются соответствующие обозначения, которые упрощают процесс подключения. Видео о сборке тестовой схемы можно посмотреть ниже.
Читать также: Мультиметр отзывы какой производитель лучше
Двигатель Д5-ТР.
Двигатель с электромагнитным возбуждением. Двигатель имеет разные варианты исполнения и схем включения, но какие бы они не были, нам нужны всего четыре конца – два от статорной обмотки и два от роторной, т.е. от коллекторных щеток.

Для того, чтобы такие двигатели вращались в другую сторону, необходимо, чтобы полярность питающего напряжения на одной из обмоток оставалась постоянной, а полярность другой менялась на противоположную. Схема включения этого, как и любого другого с электромагнитами, показана на рис.1. Здесь постоянную полярность включения имеет статорная обмотка (обмотка возбуждения), что обеспечивается применением выпрямительного моста, а полярность роторной можно менять. Теперь реверс производится так же переполюсовкой напряжения питания.
Изменение направления вращения ротора асинхронного двигателя
Наибольшее распространение в промышленности получили асинхронные двигатели, запитанные от трехфазного напряжения 380 вольт. Для того чтобы осуществить реверс, достаточно поменять две любые фазы.

Двигатель ЭДГ-2.
Схема реверса трехфазного двигателя в однофазной сети
Так как трехфазному асинхронному двигателю будет недоставать двух фаз, их нужно компенсировать конденсаторами – пусковым и рабочим, на которые коммутируют обе обмотки. От того, куда присоединить третью, зависит кручение вала в ту или иную сторону.
Читать также: Какой провод использовать для подключения электроплиты
На схеме ниже видно, что обмотка под номером 3 через рабочий конденсатор подсоединяется к трехпозиционному тумблеру, который и отвечает за режимы работы двигателя вперед/назад. Два других его контакта объединены с обмотками 2 и 1.
При включении двигателя нужно придерживаться следующего алгоритма действий:

Двигатель АВЕ – 071 – 4С.

Эти двигатели однофазные, асинхронные применялись в стиральных машинах прошлого века и я думаю, что еще переживут и меня с вами. Десятки лет они исправно вертели активатор, стирая белье и еще послужат нашим Самоделкиным. Двигатель имеет четыре вывода от двух обмоток. Одна пусковая, имеющая активное сопротивление 20 ОМ и рабочая с сопротивлением по постоянному току 50 Ом. Схема включения показана на Рис.3.
Реверс электродвигателя
Для электродвигателя режим работы с периодическим изменением направления вращения (реверсирование) является наиболее благоприятным. По той причине, что ликвидируется паразитное намагничивание, вызывающее перегрев и потерю мощности электрической машиной. Кроме того, схемы реверсивного пуска намного проще, чем механические трансмиссии, состоящие из системы зубчатых шестерней. Наибольшее число вопросов вызывает способ изменения направления вращения двигателей переменного тока, ведь изменить полярность питающего напряжения невозможно. В этой статье мы представим вам основные схемные решения для запуска асинхронных и коллекторных электродвигателей, в которых предусмотрена возможность их реверсирования.
Двигатель АОЛБ-22-4 2сер.

————————————————————————————————————

Замечательный двигатель – три в одном. Внутри имеет тепловое реле и центробежный механизм отключения пусковой обмотки. Пришлось с ним повозиться, чтобы вам нарисовать схему наиболее понятно. Установка перемычек показана на рис. 5. Схема реверсирования показана на рис. 6.
Термореле РТК-С.

В стиральных машинах применяются тепловые (защитные) реле РТ-10 и пускозащитные реле РТК-С, РТК-1, РТК-1-3, РТК-3-О и др. Тепловое реле типа РТ-10 с одним нормально замкнутым контактом служит для защиты от перегрузок электрических установок и однофазных электродвигателей переменного тока с номинальным напряжением до 220 В. Реле изготовляют на номинальные токи Iн тепловых эле¬ментов 1,2; 1,9; 2,5; 3,3 и 4,3 А. При Iн = 1,1 А реле не срабатывает в течение 30 мин; при Iн = 1,35 А реле срабатывает не более чем через 30 мин; при Iн = 2 А реле срабатывает за 18…60 с. Время самовозврата контактов в замкнутое состояние от 30 с до 10 мин. В реле встроен биметаллический термоэлемент с перекидной пружиной, которая обеспечивает мгновенное размыкание и замыкание контактов. Изоляция реле выдерживает испытательное напряжение 2000 В, приложенное в течение 1 мин. Реле устанавливают в вертикальном положении контакта¬ми вверх, питание подводится к верхнему зажиму. Реле предназначены для работы в закрытых помещениях при температуре окружающей среды от 0 до 70°С. Это довольно эффективна защита. Так что не пренебрегайте ею, а то себе будет дороже. Ну что еще, а пока все. Удачи всем. До свидания. К.В.Ю.
Требуемые компоненты

Самостоятельное подключение двигателя для реверсивного вращения не вызовет особых сложностей, если руководствоваться приведенной схемой. Одним из важных компонентов, который облегчит такую задачу является магнитный пускатель или контактор. На самом деле магнитный пускатель и контактор не являются тождественными понятиями. Если говорить просто, то контактор входит в состав магнитного пускателя, но для упрощения в статье оба понятия используются как равнозначные. Магнитные пускатели как раз и применяются для запуска, реверсивного движения и остановки асинхронных двигателей.
Читать также: Какой стороной прикручивать гайки к колесу

Возможно, возникает вопрос о том, почему нельзя использовать обычный рубильник или силовой автомат. В принципе, это допустимо, но не всегда пусковые токи, которые необходимы двигателю для нормального начала функционирования являются безопасными для человека. При включении может возникнуть пробой, который выведет из строя как выключатель, так и навредит оператору. Чтобы свести риски к минимуму, потребуется пускатель. В нем контактная часть отделена от той, с которой взаимодействует оператор. В нем есть отдельный модуль с катушкой, которая создает электромагнитное поле. Для работы катушки может потребоваться напряжение в 12 или больше вольт. При подаче этого напряжения происходит взаимодействие с металлическим сердечником, который втягивается внутрь катушки. К сердечнику закреплена пластина, которая уходит к контактной группе. Они замыкаются и происходит запуск двигателя. Остановка происходит в обратном порядке.

Кроме контактора, потребуется трехкнопочная станция. Одна клавиша выполняет функцию остановки, а две других функции запуска с разницей в направлении вращения. В трехкнопочной станции должно быть два нормально разомкнутых контакта и один нормально замкнутый. Если говорить просто, то нормальным положением контактора называется его нерабочее положение. То есть при воздействии на контакт он либо замыкается, либо размыкается. Если в рабочем состоянии он замкнут, то обозначается как НО, а если разомкнут, то обозначается как НЗ. Контакт НЗ применяется для кнопки остановки.
Читайте также: