
Электродвигатель какое физическое явление положено используется
Обновлено: 02.07.2024
Главное меню
Судовые двигатели
Главная Электродвигатели Свойства электродвигателей Режимы работы электрических машин
Электрической машиной называется устройство, служащее для преобразования механической энергии в электрическую или, наоборот, электрической энергии в механическую. В первом случае машина называется электрическим генератором, во втором случае — электродвигателем.
В основу работы электрических генераторов положен принцип электромагнитной индукции. Известно, что если проводник пересекает магнитное поле, то в нем будет наводиться электродвижущая сила (э.д. с.), которая по законам электромагнитной индукции зависит от интенсивности магнитного поля, длины проводника, скорости его движения и угла между вектором поля и вектором движения проводника. Если этот проводник замкнуть, то в цепи появится электрический ток. Так как причиной наведения электродвижущей силы в проводнике является пересечение им магнитных силовых линий, той в том случае, когда проводник неподвижен, а движется (изменяется) магнитное поле, в проводнике также будет наводиться э. д. с.
Это физическое явление и положено в основу работы электрических генераторов. Любой генератор состоит из устройства, служащего для создания магнитного потока (например, электромагнита), и электрической обмотки, в которой наводится э. д. с. У генераторов постоянного тока обмотка обычно размещается на вращающейся части, называемой якорем. Якорь располагается между полюсами, создающими магнитное поле. При вращении якоря механическим двигателем в этом магнитном поле в обмотке наводится э. д. с., которая прямо пропорциональна скорости вращения и величине магнитного потока. С помощью коллектора ток подается во внешнюю цепь.
Очевидно, что для получения электроэнергии якорь (ротор) генератора должен .вращаться каким-либо двигателем, являющимся источникам механической энергии.
Действие электродвигателей основано на свойстве проводника с током двигаться в магнитном поле. Известно, что если проводник с электрическим током поместить в магнитное поле, то на него со стороны поля будет действовать сила F, зависящая от интенсивности магнитного поля, длины проводника и величины тока в нем. Таким образом, пропуская электрический ток по обмотке якоря электрической машины, можно заставить его вращаться в магнитном поле.
Характерным свойством электрических машин является их обратимость. Действительно, если якорь машины постоянного тока вращается в магнитном поле полюсов механическим двигателем, то машина будет источником электрической энергии. Та же машина может использоваться и как источник механической энергии. Для этого к обмотке якоря с помощью щеток и коллектора нужно подвести электрическую энергию, и якорь придет во вращение.
Таким образом, для электродвигателей возможны два основных режима работы: двигательный и генераторный, часто называемый также тормозным режимом.
В двигательном режиме (рис. 1,а) к зажимам электродвигателя подводится электрическая энергия, преобразуемая им в механическую. Создаваемый при этом вращающий момент принято считать положительным, так как направление момента совпадает с направлением вращения.
При работе электродвигателя в тормозном режиме (рис. 1, б) к валу подводится механическая энергия, которая машиной преобразуется в электрическую. Создаваемый при этом вращающий момент будет отрицательным, так как он препятствует вращению машины.
Любой электродвигатель может работать в любом из этих режимов при определенных условиях. При работе в двигательном режиме к валу электродвигателя приложены два момента: момент, развиваемый электродвигателем, и момент, создаваемый приводимым в движение механизмом. Последний называют статическим моментом или моментом сил сопротивления на валу электродвигателя. В дальнейшем момент, развиваемый в двигательном режиме, будем называть вращающим, а момент, развиваемый в генераторном режиме, — тормозным.
Вращающий момент любого электродвигателя, прямо пропорционален магнитному потоку и току в обмотке якоря (ротора). Статический момент, создаваемый приводимым механизмом, определяет нагрузку электродвигателя и может быть положительным и отрицательным. Статический момент положителен, когда его направление совпадает с направлением движения, и отрицателен, когда он направлен против движения. В первом случае статический момент называется движущим, а во вторам — моментом сопротивления.
Отрицательные статические моменты создаются силами трения, силами сопротивления резанию, сжатию, растяжению и скручиванию неупругих тел, а также силой тяжести при подъеме груза. Положительные статические моменты создаются на валу электродвигателя силой тяжести при спуске груза. Статический момент может также состоять из нескольких слагаемых, имеющих разные знаки. Например, при спуске груза сила тяжести создает положительный статический момент, а сила трения будет создавать отрицательный статический момент. Знак результирующего статического момента будет зависеть от величины первого и второго слагаемых.
Условимся момент, развиваемый электродвигателем (вращающий или тормозной), обозначать М, а статический момент (движущий или момент сопротивления) — M c .
Когда электродвигатель работает в установившемся режиме, т. е. ) при равномерном движении, всегда поддерживается равенство
±М=± М с . (1)
В общем случае связь между моментом электродвигателя и статическим моментом выражается уравнением
±М±М с = М j , (2)
где М — момент, развиваемый электродвигателем, кГм;
М с — статический момент, создаваемый механизмом на валу электродвигателя, кГм;
М j — динамический или избыточный момент на валу электродвигателя, кГм.
Динамический момент является результирующим моментом рассматриваемой механической системы. Он определяется по выражению
где J — момент инерции движущих частей, приведенный к валу электродвигателя, кГм·сек 2 ;
d? / dt — угловое ускорение электродвигателя, рад/сек 2 .
Угловое ускорение двигателя определяется величиной и знаком динамического момента, который может быть ускоряющими тормозным.
При ± М ± М с > 0 угловое ускорение d?/dt >0 и, следовательно, скорость двигателя увеличивается (динамический момент является ускоряющим); при ±М=± М с = 0 угловое ускорение d?/dt = 0 (имеет место установившийся режим работы электродвигателя); при ±М=± М с d?/dt М с . Если же М> М c , то имеет место ускоренное вращение электродвигателя, а при М М c — замедленное вращение электродвигателя.
Электрический двигатель, сокращенно электродвигатель - электрическая машина, с помощью которой электрическая энергия преобразуется в механическую, для приведения в движение различных механизмов. Электродвигатель является основным элементом электропривода.
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является - электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
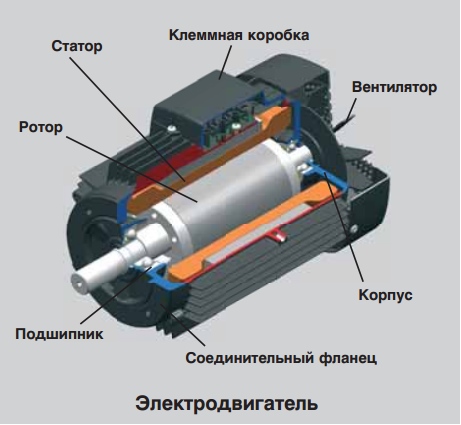
Конструкция электродвигателя
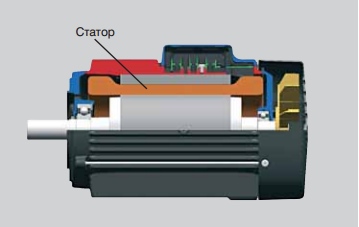
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор - неподвижная часть, ротор - вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя

2. Если проводник с током I согнуть в рамку и поместить в магнитное поле, то две стороны рамки, находящиеся под прямым углом к магнитному полю, будут испытывать противоположно направленные силы F


4. Производимые электродвигатели имеют несколько витков на якоре, чтобы обеспечить больший постоянный момент.

5. Магнитное поле может создаваться как магнитами, так и электромагнитами. Электромагнит обычно представляет из себя провод намотанный на сердечник. Таким образом, по закону электромагнитной индукции ток протекающий в рамки будет индуцировать ток в обмотки электромагнита, который в свою очередь будет создавать магнитное поле.
-
Подробное описание принципа работы электродвигателей разных типов:
Классификация электродвигателей
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, - датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока - электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ - коллекторный двигатель постоянного тока
- БДПТ - бесколлекторный двигатель постоянного тока
- ЭП - электрический преобразователь
- ДПР - датчик положения ротора
- ВРД - вентильный реактивный двигатель
- АДКР - асинхронный двигатель с короткозамкнутым ротором
- АДФР - асинхронный двигатель с фазным ротором
- СДОВ - синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина - вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель
Может работать на переменном и постоянном токе. Широко используется в ручном электроинструменте и в некоторых бытовых приборах (в пылесосах, стиральных машинах и др.). В США и Европе использовался как тяговый электродвигатель. Получил большое распространение благодаря небольшим размерам, относительно низкой цены и легкости управления.

Коллекторный электродвигатель постоянного тока
Электрическая машина, преобразующая электрическую энергию постоянного тока в механическую. Преимуществами электродвигателя постоянного тока являются: высокий пусковой момент, быстродействие, возможность плавного управления частотой вращения, простота устройства и управления. Недостатком двигателя является необходимость обслуживания коллекторно-щеточных узлов и ограниченный срок службы из-за износа коллектора.
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина - вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].
Асинхронный электродвигатель
Наиболее распространенный электродвигатель в промышленности. Достоинствами электродвигателя являются: простота конструкции, надежность, низкая себестоимость, высокий срок службы, высокий пусковой момент и перегрузочная способность. Недостатком асинхронного электродвигателя является сложность регулирования частоты вращения.
Cинхронный электродвигатель
Синхронные двигатели обычно используются в задачах, где требуется точное управление скоростью вращения, либо где требуется максимальное значение таких параметров как мощность/объем, КПД и др.
Специальные электродвигатели
Серводвигатель
Серводвигатели не являются отдельным классом двигателей. В качестве серводвигателя могут использоваться электродвигатели постоянного и переменного тока с датчиком положения ротора. Серводвигатель используется в составе сервомеханизма для точного управления угловым положением, скоростью и ускорением исполнительного механизма. Для работы серводвигатель требует относительно сложную систему управления, которая обычно разрабатывается специально для сервопривода.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) - векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.

,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м

,
- где Pном – номинальная мощность двигателя, Вт,
- nном - номинальная частота вращения, мин -1 [4]
Начальный пусковой момент - момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя - это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность - физическая величина, показывающая какую работу механизм совершает в единицу времени.

,
- где P – мощность, Вт,
- A – работа, Дж,
- t - время, с
Работа - скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].

,
Для вращательного движения

,

,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Справка: Номинальное значение - значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя - характеристика эффективности машины в отношении преобразования электрической энергии в механическую.

,

- где – коэффициент полезного действия электродвигателя,
- P1 - подведенная мощность (электрическая), Вт,
- P2 - полезная мощность (механическая), Вт
-
При этом потери в электродвигатели обусловлены:
- электрическими потерями - в виде тепла в результате нагрева проводников с током;
- магнитными потерями - потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями - потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями - потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n - частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции - скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси

,
- где J – момент инерции, кг∙м 2 ,
- m - масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением

,

,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) - напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени - это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.

,
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.


Зависимость мощности от скорости вращения вала для двигателей разных типов при ограниченном токе статора
Принцип работы электродвигателей
Принцип работы электродвигателей. Основные понятия.
Магнетизм
Наиболее характерное магнитное явление - притяжение магнитом кусков железа - известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые - отталкиваются друг от друга.
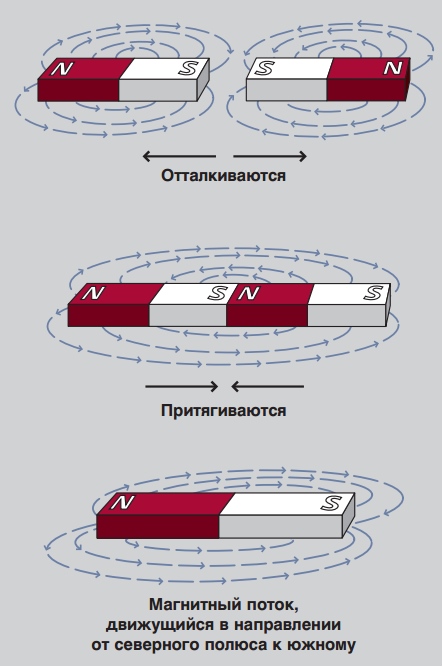
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
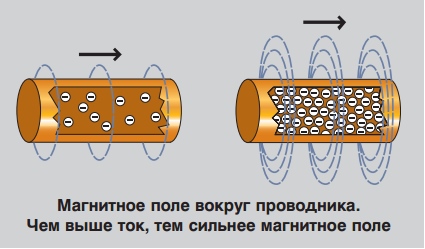
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
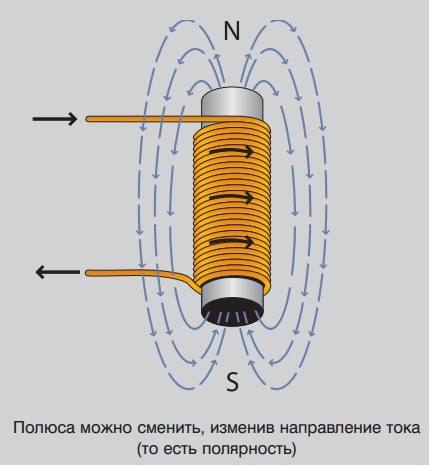
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
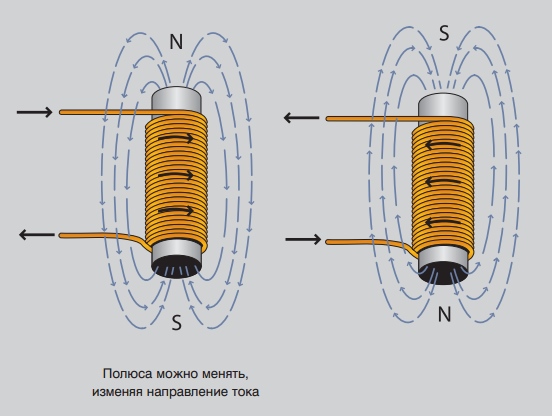
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса - притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток - AC
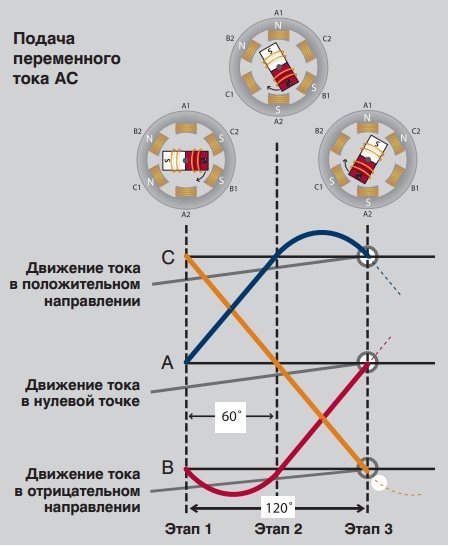
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
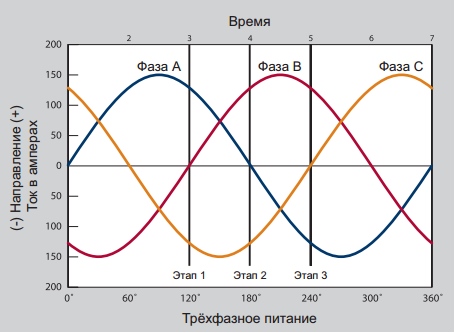
Трёхфазный переменный ток
Трёхфазное питание - это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

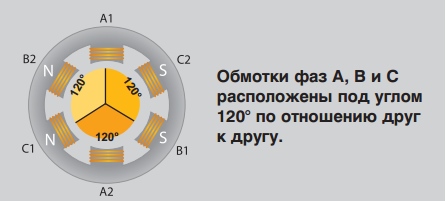
Для наглядности мы заменили ротор вращающимся магнитом, а статор - катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе - B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая - южным. Таким образом, если A1 - северный полюс, то A2 - южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
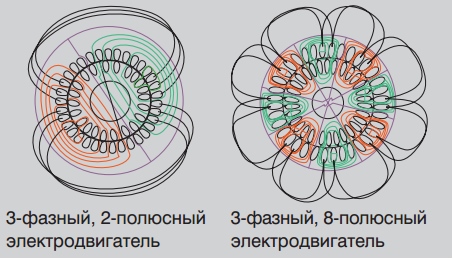
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
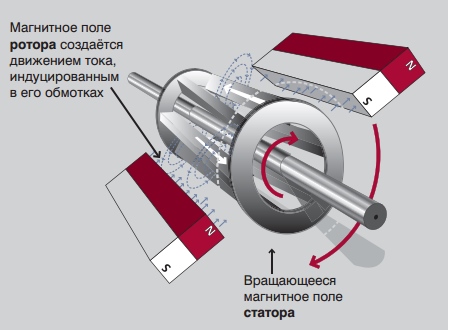
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция - это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
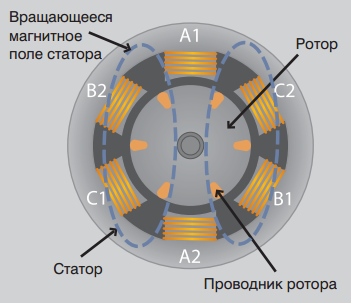
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
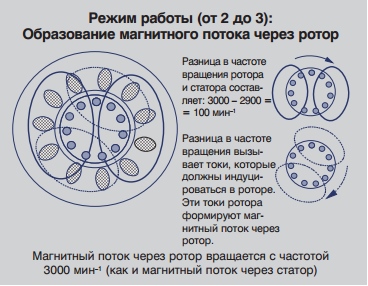
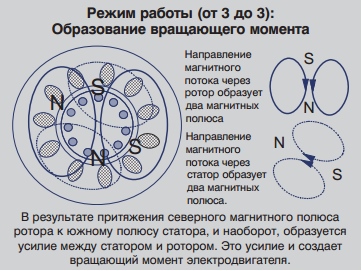
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

Статор элетродвигателя
Статор - это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
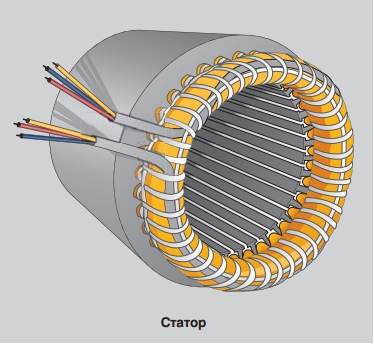
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью - из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры - класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
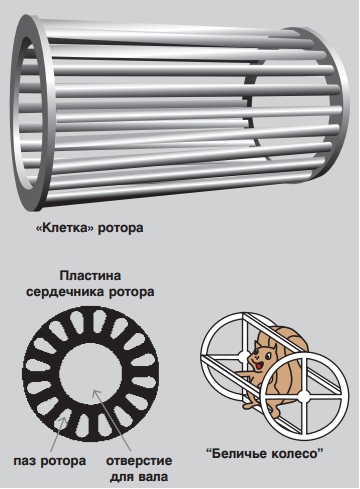
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.

Якоби Борис Семенович
Уже в 1821 году, знаменитый британский ученый Майкл Фарадей продемонстрировал принцип преобразования электромагнитным полем электрической энергии в механическую энергию. Установка состояли из подвешенного провода, которых окунался в ртуть. Магнит устанавливался посередине колбы с ртутью. При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
Эту модель двигателя часто демонстрировали в школах и университетах. Данный двигатель считается самым простым видом из всего класса электродвигателей. Впоследствии он получил продолжение в виде Колеса Барлова. Однако новое устройство носило лишь демонстрационный характер, поскольку вырабатываемые им мощности были слишком малы.
Ученые и изобретатели работали над двигателем с целью использования его в производственных нуждах. Все они стремились к тому, чтобы сердечник двигателя двигался в магнитном поле вращательно-поступательно, на манер поршня в цилиндре паровой машины. Русский изобретатель Б.С. Якоби сделал все гораздо проще. Принцип работы его двигателя заключался в попеременном притяжении и отталкивании электромагнитов. Часть электромагнитов были запитаны от гальванической батареи, и направление течения тока в них не менялась, а другая часть подключалась к батарее через коммутатор, благодаря которому изменялось направление течения тока через каждый оборот. Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.

электродвигатель Бориса Якоби Изначально мощность двигателя была небольшой и составляла всего 15 Вт, после доработок, Якоби удалось довести мощность до 550 Вт.. 13 сентября 1838 году, лодка, оборудованная этим двигателем, плыла с 12 пассажирами по Неве, против течения, развивая при этом скорость в 3 км/ч. Двигатель был запитан от большой батареи, состоящей из 320 гальванических элементов. Мощность современных электрических двигателей превышает 55 кВт. По вопросом прибретения электрических двигателей смотрите здесь.
Принцип действия.
В основу работы электрической машины заложено явление электромагнитной индукции (ЭМИ). Явление ЭМИ заключается в том, что при любом изменении магнитного потока, пронизывающего замкнутый контур, в нем (контуре) образуется индукционный ток.
Сам двигатель состоит из ротора (подвижной части – магнита или катушки) и статора (неподвижной части – катушки). Чаще всего конструкция двигателя представляет собой две катушки. Статор обложен обмоткой, по которой, собственно, и течет ток. Ток порождает магнитное поле, которое воздействует на другую катушку. В ней, по причине ЭМИ, так же образуется ток, который порождает магнитное поле, действующее на первую катушку. И так все повторяется по замкнутому циклу. В итоге, взаимодействие полей ротора и статора создает вращающий момент, приводящий в движение ротор двигателя. Таким образом, происходит трансформация электрической энергии в механическую, которую можно использовать в различных приборах, механизмах и даже в автомобилях.
Вращающееся магнитное поле



Вращение электромотора
Классификация электрических двигателей.
По способу питания:
• двигатели постоянного тока – запитываются от источников постоянного тока.
• двигатели переменного тока - запитываются от источников переменного тока.
• универсальные двигатели – запитываются как от постоянного, так и переменного тока.
По конструкции:
Коллекторный электродвигатель — электродвигатель, в котором в качестве датчика положения ротора и переключателя тока используется щеточноколлекторный узел.
Бесколлекторый электродвигатель – электродвигатель, состоящий из замкнутой системы, в которой используются: системы управления (преобразователь координат), силовой полупроводниковый преобразователь (инвертор), датчик положения ротора (ДПР).
• С приведением в действие постоянными магнитами;
• С параллельным соединением якоря и обмоток возбуждения;
• С последовательным соединением якоря и обмоток возбуждения;
• Со смешанным соединением якоря и обмоток возбуждения;

трехфазные асинхронные двигатели
По количеству фаз:
• Однофазные – запускаются вручную, либо же имеют пусковую обмотка или фазосдвигающую цепь.
• Двухфазные
• Трехфазные
• Многофазные
По синхронизации:
• Синхронный электродвигатель – электрический двигатель переменного тока с синхронным движением магнитного поля питающего напряжения и ротора.
• Асинхронный электродвигатель – электрический двигатель переменного тока с отличающейся частотой движения ротора и магнитного поля, порождаемого питающим напряжением.
Читайте также: