Какие основные законы положены в основу работы электродвигателя
Обновлено: 06.05.2024
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Кроме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
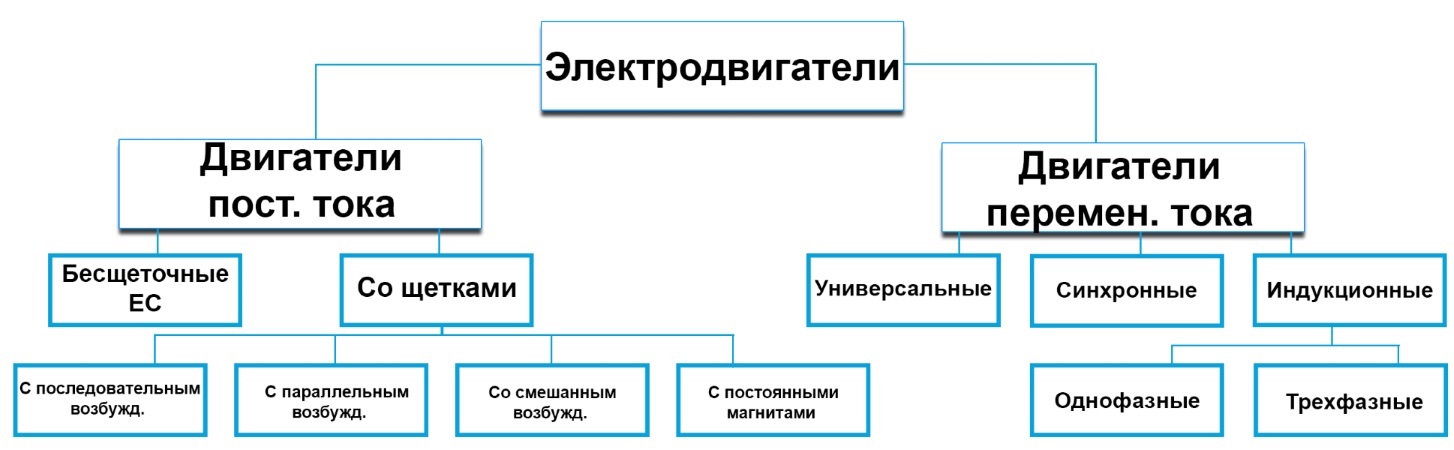
Классы электродвигателей:
- Постоянного тока
- Бесщеточные ЕС (электронно-коммутируемые)
- Со щетками
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
- Переменного тока
- Универсальные
- Синхронные
- Индукционные
- Однофазные
- Трехфазные
Таблица классификации электронных двигателей:
![]()
Электродвигатели постоянного тока
Двигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
- Возможность регулировки частоты вращения путем изменения напряжения в обмотке возбуждения. При этом крутящий момент на валу ДПТ (двигатели постоянного тока) остается неизменным.
- Высокий к.п.д. (коэффициент полезного действия) у машин постоянного тока несколько выше, чем у самых распространенных асинхронных двигателей переменного тока. При неполной нагрузке на валу к.п.д. ДПТ выше на 10-15%.
- Возможность изготовления ДПТ небольших габаритов. Практически все используемые микроприводы рассчитаны на постоянный ток.
- Простота схем управления. Для пуска, реверса и регулирования скорости и момента не требуется сложного электронного оборудования и большого количества аппаратов для коммутации.
- Возможность работы в режиме генератора. Электродвигатели такого типа можно использовать в качестве источников постоянного тока.
- Высокий пусковой момент. ДПТ используют в составе электроприводов кранов, тяговых и грузоподъемных механизмов, где требуется запуск под значительной нагрузкой.
ДПТ различают по способу возбуждения, они бывают:
- С постоянными магнитами. Такие двигатели отличаются малыми габаритами. Основная область их применения – микроприводы.
- С электромагнитным возбуждением.
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
- Двигатели с параллельным возбуждением. Обмотки якоря и статора в электрической машине такого типа соединены параллельно. Такие электрические машины не требуют дополнительного источника питания для обмотки возбуждения, скорость вращения ротора практически не зависит от нагрузки. Их используют для привода металлорежущих станков и другого оборудования.
- Электродвигатели с последовательно включенной обмоткой статора. ДПТ этого типа имеют значительный пусковой момент. Их применяют в качестве привода электротранспорта и промышленных установок с необходимостью пуска под нагрузкой.
- Двигатели с независимым возбуждением. Для питания обмотки статора таких электромашин используется независимый источник постоянного тока. ДПТ такого типа отличаются широким диапазоном регулирования скоростей.
- Электрические машины со смешанным возбуждением. Электромагнит возбуждения в таких двигателях поделен на 2 части. Одна из них включена параллельно, вторая последовательно обмотке якоря. Электрические машины такого типа используются в механизмах и оборудовании, где необходим высокий пусковой момент, а также переменная и постоянная скорость при переменном моменте.
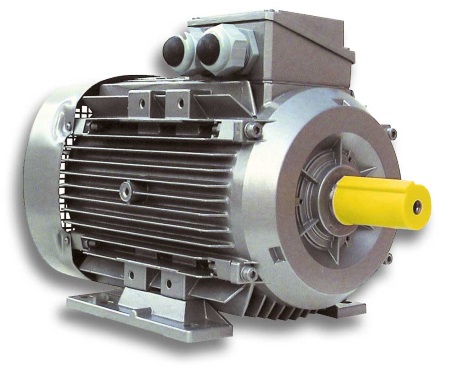
Электродвигатели переменного тока
Электрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели.
![]()
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.
Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Синхронные двигатели переменного тока
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Универсальные двигатели
В отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации.
К преимуществам таких машин относятся:
- Высокая скорость вращения. Универсальные электродвигатели развивают скорость до 10 000 об/мин и более.
- Питание от переменного и постоянного напряжения. Двигатели такого типа широко применяют для электроинструментов, имеющих дополнительные аккумуляторные батареи.
- Возможность регулирования скорости без использования дополнительных устройств.
Однако, такие электромашины имеют свои недостатки:
- Ограниченная мощность.
- Необходимость обслуживания коллекторного узла.
- Тяжелые условия коммутации при питании от переменного напряжения из-за наличия трансформаторной связи между обмотками.
- Электромагнитные помехи при подключении к сети переменного тока.
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров.
Принцип работы электродвигателей
Принцип работы электродвигателей. Основные понятия.
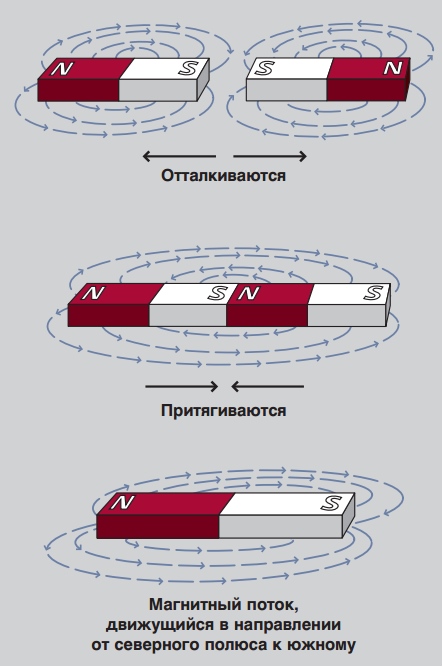
Магнетизм
Наиболее характерное магнитное явление - притяжение магнитом кусков железа - известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые - отталкиваются друг от друга.
![Магнетизм]()
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
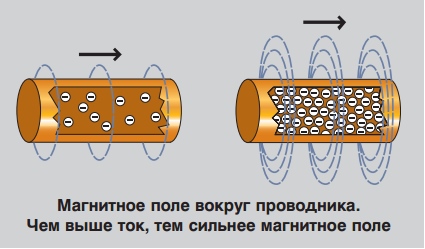
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
![магнитное поле вокруг проводника]()
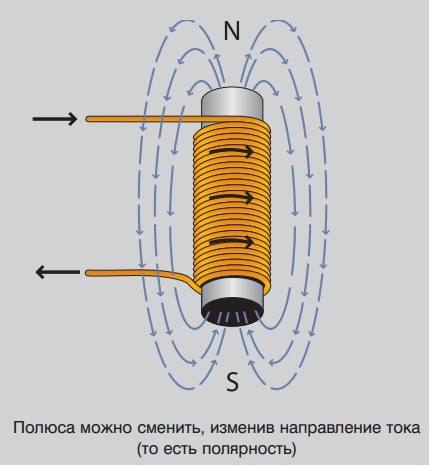
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
![магнитное поле вокруг катушки]()
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
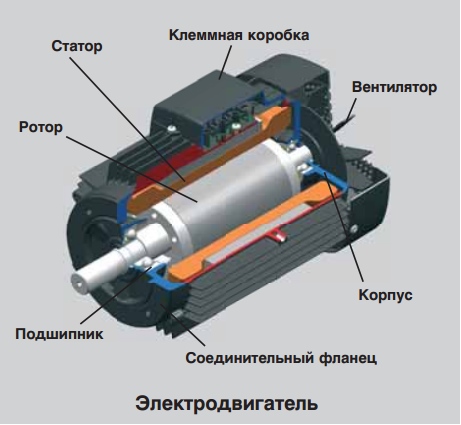
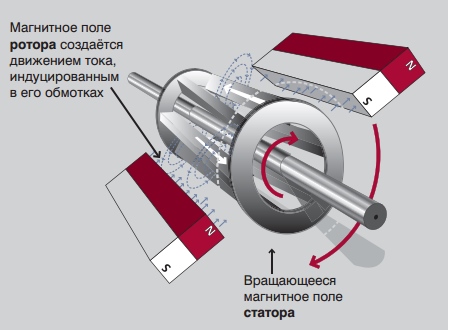
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
![электродвигатель]()
Вращение под действием магнитного поля
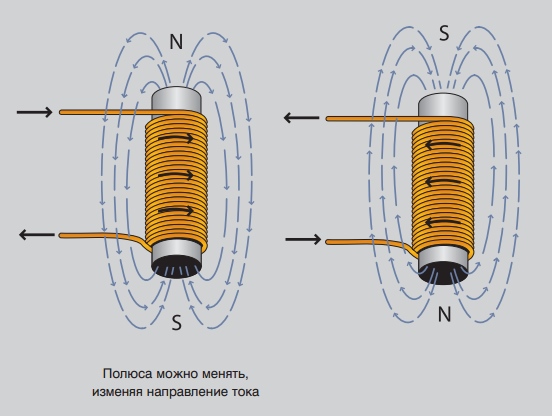
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса - притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
![смена полюсов магнита при изменении направления тока]()
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
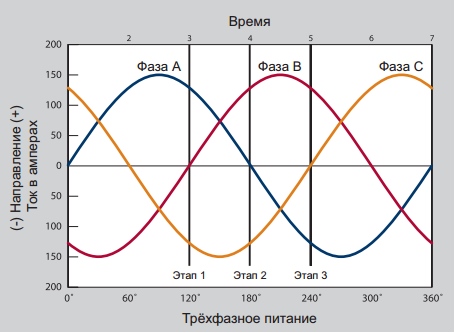
Переменный ток - AC
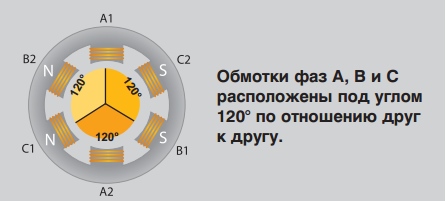
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
![Вращающееся магнитное поле с помощью трёхфазного питания]()
Трёхфазный переменный ток
Трёхфазное питание - это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
![Смена полюсов]()
Для наглядности мы заменили ротор вращающимся магнитом, а статор - катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе - B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая - южным. Таким образом, если A1 - северный полюс, то A2 - южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
![Обмотки фаз]()
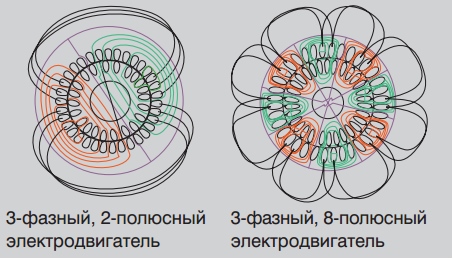
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
![число полюсов]()
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
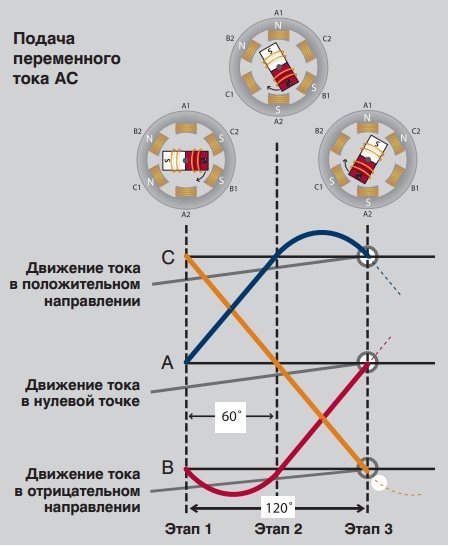
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
![Вращение ротора в сторону вращения магнитного поля]()
Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
![поляризация ротора]()
Индукция
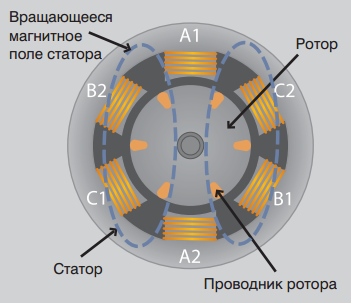
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция - это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
![Магнитное поле ротора]()
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
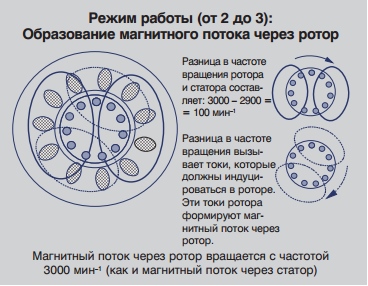
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
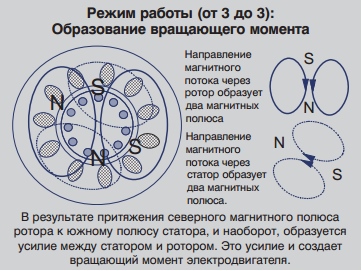
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.
![Магнитный поток через статор]()
![магнитный поток через ротор]()
![вращающий момент]()
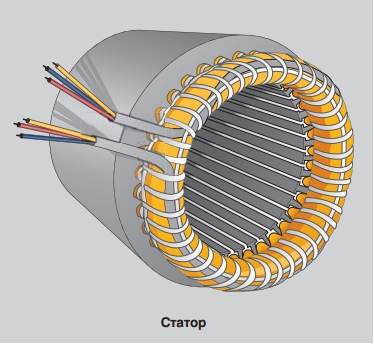
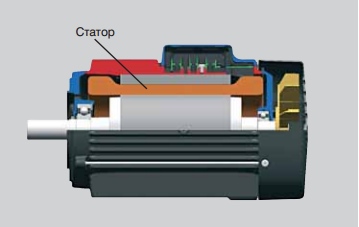
Статор элетродвигателя
Статор - это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
![Статор]()
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью - из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
![статор электродвигателя]()
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры - класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
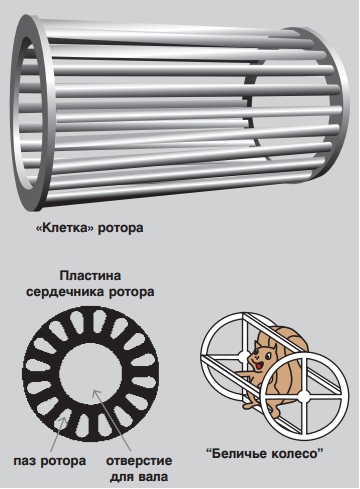
Ротор элетродвигателя
![беличье колесо - короткозамкнутый ротор]()
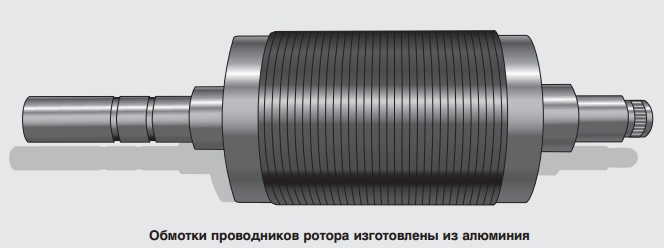
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
![Обмотки проводников ротора]()
Асинхронные электродвигатели
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
![]()
Unfortunately, you are using an outdated browser. Please update your browser to improve performance, quality of the displayed material, and improve security.
Электрический двигатель (коротко – электродвигатель) преобразует энергию тока в механическое движение. Принцип работы устройства основан на магнетизме, что определяет присутствие в конструкции магнитов (постоянных, электромагнитов, материалов с магнитными свойствами).
Виды электродвигателей
Таблица классификации различает электродвигатели по разным признакам, основные из них – тип питания и принцип работы. Первый делит устройства на электродвигатели постоянного тока (работают на аккумуляторах, батарейках, других источниках) и переменного тока (запитаны напрямую от электрической сети).
По принципу работы электрические двигатели делят на синхронные и асинхронные.
- Синхронные электродвигатели сложнее в плане конструкции. У них есть обмотка ротора, а питание подается через щеточный механизм. Свое название получили благодаря синхронности вращения с магнитным полем, которое его запускает.
- Асинхронные просты в сборке, а потому пользуются самой большой популярностью (нет обмотки, щеток и т. д.). Их роторы двигаются медленнее магнитного поля, что определяет асинхронность вращения электродвигателя и его название.
В быту и промышленности встречаются электрические двигатели различных видов, типов, классов, мощностей. Самыми востребованными остаются простые в конструкции устройства, которые решают задачу преобразования электроэнергии в механическое вращение вала. Но даже в этой группе есть масса нюансов, которые нужно знать, чтобы правильно эксплуатировать оборудование. Начинается такая практика (грамотного использования электродвигателей для любых целей) с понимания того, как оно функционирует (принципов работы).
Принцип работы синхронного электродвигателя на видео
Принцип работы асинхронного электродвигателя на видео
Конструкция электродвигателя
- коллектору;
- щеточному механизму (2 щетки + 2 пластины/ламели);
- ротору электрического двигателя (якорь, в синхронном двигателе имеет 1 обмотку);
- статору, на котором устанавливаются магниты (в электродвигателях постоянного тока – постоянные).
Ротор
Ротор – подвижный элемент электрического двигателя, запускаемый магнитным полем, совершает вращательные движения вместе с валом. Имеет минимум 3 зуба, один из которых стабильно попадает в область подключения.
Коллектор электродвигателя
Ротор переключается автоматически. За эту функцию отвечает коллектор – конструкция из двух ламелей, закрепленных на роторном валу и двух щеток, выполняющих функцию токосъемных контактов (обеспечивают подачу постоянного тока на ламели). Принцип работы такой:
- ротор вращается, меняя направление тока;
- когда якорь совершает поворот на 180 градусов, ламели меняются местами;
- при смене позиций пластин меняется и направление тока, и (соответственно) полюсы магнита;
- одноименные полюсы, подчиняясь законам физики, взаимно отталкиваются – катушка вращается, ее полюсы притягиваются к противоположным полюсам на другой стороне магнита.
Статор электрического двигателя
Статор – стационарный или неподвижный блок электродвигателя. Другое название – индуктор . Он включает несколько обмоток со сменяемой полярностью (при прохождении переменного тока), что и обеспечивает образование магнитного поля. В большинстве случаев статор имеет 2 пары основных полюсов, но может включать и вспомогательные для лучшего переключения ротора на коллекторе.
Принцип работы электрического двигателя
![3.jpg]()
Принцип работы электродвигателя построен на процессах взаимного притяжения и отталкивания одно- и разноименных полюсов магнитов на роторе (находится в движении) и статоре (его магнит неподвижен). В самой простой сборке электродвигателя постоянного тока в роли ротора выступает катушечный узел, а индуктором – сам магнит.
Магнитное поле электродвигателя
Принцип работы статорного электродвигателя (также называется индукционным) тоже основан на формировании магнитного поля статора. Оно образуется во время прохождения токов через его обмотки. Это поле (вращающееся магнитное) формирует магнитное поле ротора через индукцию токов в обмотках его проводников.
Оно же (статорное поле) создает собственный магнитный поток, при этом наблюдается пропорциональная связь:
- магнитное поле статора пропорционально электронапряжению в сети;
- магнитный поток, создаваемый вращающимся полем, пропорционален току.
Характеристики поля статора зависят от токов, проходящих через обмотки, и числа обмоток фаз. Магнитное поле ротора, в свою очередь, тоже формирует поток, движущийся медленнее потока статора. Оба потока (статора и якоря) взаимно притягиваются, принуждая ротор совершать вращательные движения.
Так возникает крутящий момент – тот самый ключевой процесс, ради которого собирается вся конструкция электродвигателя . Учитывая роль статора и ротора в работе электродвигателя переменного тока, несложно заключить, что именно эти 2 элемента имеют самое большое значение в его сборке.
Электрический двигатель постоянного тока (принцип работы синхронного электродвигателя)
![4.jpg]()
Под синхронными электрическими двигателями понимают устройства постоянного тока. Принцип работы такого устройства можно кратко описать 4 пунктами:
- к обмотке статора (ее еще называют индукторной или обмоткой возбуждения) подается постоянный ток;
- проходя через обмотку, ток образует постоянное магнитное поле возбуждения (используется постоянный магнит);
- к роторной обмотке тоже подается постоянный ток, на который воздействует поле статора, обеспечивая возникновение крутящего момента;
- под действием вращательной силы, ротор поворачивается на 90 градусов.
Это один цикл. После поворота обмотка якоря снова подпадает под влияние статорного магнитного поля, и ротор снова совершает поворот.
Токосъемные щетки, которые представляют собой графитовые стержни с высокой проводимостью и низким коэффициентом трения при скольжении, необходимы для присоединения коллектора к сети. В качестве магнитов могут применяться физически существующие материалы с высокими магнитными свойствами. Но часто из-за их массы в электродвигателях постоянного тока увеличенной мощности магниты заменяют несколькими металлическими штифтами/стержнями. При этом:
У синхронных электрических двигателей высокой мощности, обслуживаемых постоянным током, есть ряд конструктивных нюансов, ряд из которых проявляется в динамике (во время функционирования устройства). Среди них – смещение щеток роторного коллектора по отношению к валу на определенный угол против его вращения при изменении нагрузки на двигатель. Это необходимо, чтобы компенсировать эффект, называемый реакцией ротора/якоря и предупреждению торможения вала электродвигателя, которое снижает эффективность работы подключенного к нему оборудования.
Способы подключения синхронного электродвигателя
![5.jpg]()
Преимущество синхронных электродвигателей, обеспечиваемое принципом их работы, – поступательное (плавное) регулирование скорости вращения, это обеспечило их высокую эффективность при работе с тягой – на грузоподъемниках и электромашинах. В современной практике применяют 3 схемы подключения электрических двигателей постоянного тока: с параллельным, последовательным и комбинированным возбуждением.
В первом случае вместе (параллельно) с обмоткой ротора запускается дополнительная регулируемая (обычно) обмотка-реостат. Такой вариант эффективен, когда для нормальной работы машины требуется плавная регулировка скоростей вращательного движения и максимальной стабильности количества оборотов в минуту. Примеры – электродвигатели кранов, промышленных станков и линий.
При последовательном подключении вспомогательная роторная обмотка в цепь процессов возбуждения ротора включается последовательно. Это обеспечивает возможность резкого увеличения усилия электрического двигателя в определенные моменты (на старте движения состава, например).
Устройство синхронного электродвигателя на видео
Принцип работы УКД (коллекторных электродвигателей универсального применения)
УКД (двигатели универсального использования) применяются в маломощных устройствах и электроинструментах (бытовых, профессиональных) – везде, где требуется высокий момент вращения на хорошей скорости, плавная регулировка числа оборотов и небольшие пусковые токи. По конструкции УКД повторяют синхронные с последовательной схемой электродвигателя .
Принцип работы УКД:
- при подаче напряжения на статоре возникает магнитное поле;
- исполнение магнитного провода в УКД несколько отличается – здесь они сделаны не цельнолитыми, а сборными во избежание перемагничивания и нагрева токами Фуко;
- вспомогательная обмотка ротора (индуктивность) подключается к питанию последовательно, что позволяет настраивать одинаковую направленность магнитных полей статора и ротора в одной фазе;
- магнитные поля индуктора и якоря практически полностью синхронны – электродвигатель набирает скорость вращения при высоких нагрузках, что важно для работы многих инструментов (перфораторов, шуруповертов, пылесосов, точильных аппаратов и т. д.).
При включении в цепь электродвигателя регулируемого трансформатора добавляется еще и возможность плавной регулировки его скорости вращения. А вот изменять вектор магнитного поля, если это коллекторный двигатель переменного тока, невозможно ни при каких обстоятельствах.
Коллекторный электродвигатель общего назначение имеет много плюсов. Он выдает высокий крутящий/вращающий момент, способен развивать высокую вращательную скорость, при этом весит и места занимает немного. Есть и минусы: графитовые щетки имеют низкую износостойкость (быстро стираются на больших скоростях вращения), снижая ресурс всей сборки.
Асинхронные электрические двигатели
![6.jpg]()
Электродвигатель переменного тока (он же асинхронный) тоже использует магнитное поле для создания крутящего момента. Его изобретатель – российский физик-электротехник, Михаил Осипович Доливо-Добровольский. Первый образец асинхронного электрического двигателя появился в 1890-м (с него начались теория и практика применения 3-фазного переменного тока).
Конструкция и устройство электродвигателей переменного тока:
- на каждый статор наматывается 3 обмотки;
- к каждой обмотке подключается 1 из 3 фаз;
- для охлаждения обмоток, которые сильно нагреваются, пропуская через себя переменные токи, на торцовый вал электрического двигателя устанавливается кулер (вентилятор).
- напряжение, подаваемое с 3 фаз на обмотки статора, образует магнитное поле (частота его вращения равна частоте вращения в сети – 50 Гц);
- ротор располагается внутри индуктора, и в нем тоже возникает свое поле;
- поле ротора отталкивается от поля статора, образуя вращательный момент.
За счет того, что в электрических двигателях переменного тока используется короткозамкнутая система, при взаимодействии магнитного поля статора и обмотки ротора, в последнем образуется очень большой ток. Он и формирует собственное поле якоря. Контактируя по законам взаимного притяжения/отталкивания полюсов с магнитным потоком индуктора, поле ротора приводит в движение вал электродвигателя в направлении, аналогичном направлению этого поля.
Устройство электродвигателя переменного тока на видео
Почему асинхронный?
В результате при старте работы такого электродвигателя происходит соединение с питанием и поступательное снижение активного сопротивления в цепи ротора до нуля. Нет миганий, перегрузок электросети – двигатель переменного тока запускается плавно.
Преимущества электродвигателей переменного тока
![7.jpg]()
Электродвигатели асинхронного типа сделали возможной эксплуатацию 3-фазной сети, которая, по сути, сформирована тремя отдельными цепями с синусоидальными движущими силами (ЭДС) в каждой из них. ЭДС в фазах имеют одинаковую частоту, создаются одним источником (обычно это 3-фазный генератор), но сдвинуты по отношению друг к другу на 120 градусов.
3-фазная сеть – это уравновешенная система с константной мгновенной суммарной мощностью, а электродвигатель переменного тока, который от нее питается, имеет неоспоримые преимущества. Среди них:
Однофазные электродвигатели
Наряду с 3-фазным, в практике широко применяются и 1-фазные асинхронные электродвигатели. Они представляют собой электрооборудование, питаемое от бытовой сети с напряжением 220 В (частота – 50 Гц). Как и 3-фазный аналог, он работает на преобразование получаемой электроэнергии в механическое действие – вращение.
Устройство и принцип работы 1-фазного двигателя проще:
- на статоре формируются минимум 2 обмотки – пусковая и рабочая;
- оси обмоток должны быть сдвинуты по отношению друг к другу на 90%;
- в конструкции добавляется еще один элемент – фазосдвигающий (это может быть катушка, конденсатор или резистор);
- питание осуществляется через подачу переменного тока на обмотку.
1-фазные электродвигатели переменного тока устанавливаются на приборах бытового применения (от центрифуг стиральных машин до холодильников) и маломощных станках для обрабатывающих предприятий.
Сравнение одно- и трехфазных электрических двигателей
![9.jpg]()
По сравнению с 3-фазными 1-фазные асинхронные двигатели несколько проигрывают по ряду характеристик:
- мощность первых как минимум на 30% ниже при аналогичных размерах;
- однофазные устройства не способны работать на холостом ходу дольше 5–10 минут;
- перегрузочная способность у трехфазных значительно выше.
Главный плюс коллекторного электродвигателя общего назначения (который может питаться от постоянного тока и переменного) – экономичность. Максимальный крутящий момент и потребление тока такими устройствами ограничены благодаря индуктивному сопротивлению на малых оборотах.
Двигатели с увеличенным скольжением
В отдельную группу электродвигателей стоит выделить трехфазные устройства с повышенным сопротивлением роторной обмотки, которая обеспечивает критическое скольжение. Оно составляет в механизмах с увеличенным скольжением 40%. Сами они применяются в машинах с высокой инерционностью, работающих в режиме частых кратковременных запусков.
Каталог электродвигателей по цене производителя
Если вы увлекаетесь техникой , то наша статья будет интересна к ознакомлению . В ней мы объясним читателям принцип работы электродвигателей и сложную систему их классификации . Из материала можно будет узнать , какими бывают виды электродвигателей , где наиболее часто они используются и почему эти устройства так популярны .
![]()
Виды и особенности электродвигателей
Наш материал будет посвящен электроприводу — одному из самых старых устройств , разработка которого началась еще в середине XIX столетия . Впрочем , несмотря на прошедшие века , эти устройства вполне комфортно чувствуют себя и в первой четверти 21 века . Электрические двигатели популярны , востребованы , а их мощностные спецификации совершенствуются . Мы не будем рассказывать о том , как сделать электродвигатель , но давайте узнаем , как устроены электромоторы , какими они бывают и как их подобрать , по каким техническим спецификациям их классифицируют и где они нашли применение .
Устройство и принцип работы электродвигателя
Электрический двигатель — изделие , которое преобразует электроэнергию в механическую . Достигается это при помощи работы внутренних механизмов электромотора . Необходимо отметить , что движок — это главная деталь привода .
Есть определенные рабочие режимы электрического привода , когда мотор выполняет функцию преобразователя электроэнергии ( другими словами — выступает в роли электрогенератора ).
В зависимости от спецификаций механики движения , выделяют различные виды электродвигателей . Среди них :
- вращающиеся ;
- линейные и другие типы .
Подробно вопросы классификации мы рассмотрим в соответствующем разделе , но внесем одну ясность — зачастую под понятием “ электрический двигатель ” рассматриваются именно вращающиеся модели , получившие наибольшее распространение и , как следствие , применения в самых разных сферах , отраслях .
![]()
По виду создаваемого механического движения модели бывают вращающиеся , линейные и т . д . Под электроприводами очень часто подразумевают именно вращающиеся , так как они получили самое большое распространение и , как следствие , применение , чем другие виды двигателей .
Из чего состоит электродвигатель
Что понять , как работает электродвигатель мы должны разобраться , как устроен электродвигатель , из чего он состоит , узнать плюсы и минусы изделий . Главными деталями ( а мы рассматриваем именно вращающийся электромотор ), обеспечивающими плавный пуск двигателя , являются :
- статор — неподвижный компонент ;
- ротор — механизм , отвечающий за вращательные движения .
Эти основные элементы присущи всем моделям вне зависимости от их типа .
Чаще всего компании — производители помещают ротор внутри статора , для достижения оптимального КПД электродвигателя . Если же движок имеет противоположную состав конструкции , подразумевающей расположение подвижного компонента снаружи , то такие изделия являются асинхронными или обращенными электродвигателями с короткозамкнутым ротором .
![]()
Как работает электродвигатель
Обратимся к физике и рассмотрим принцип функционирования электропривода . Так , по закону Ампера мы имеем проводник ( I ). Он находится в магнитном поле , соответственно, на него оказывает действие сила ( F ). В том случае , если проводник ( I ) согнут в специальную рамку , в магнитном поле наблюдается следующая картина : на обе стороны рамки , расположенные под углом в 90 градусов , оказывают воздействие разнонаправленные силы ( F ), которые и создают вращательные движения .
Для обеспечения постоянного момента вращения на якорях движков устанавливают специальные витки . Что касается магнитного поля , то оно достигается за счет использование магнитов ( также могут применяться электромагниты — провода , которыми обматывают сердечник ) из — за чего энергия , воздействующая на рамки проводника , индуцирует электричество , что способствует высокому КПД движка .
![]()
Классификация электродвигателей
Мы подошли к самому объемному пласту информации , который должен объяснить , по какому принципу подбирают и разделяют виды двигателей . И если по специфике организации вращательного момента техники можно поделить всего на пару категорий , а именно — гистерезисные и магнитоэлектрические , то дальше не все так однозначно . Давайте разбираться вместе . Необходимо отметить , что у гистерезисных электромоторов за вращательный момент отвечает магнитный гистерезис , оказывающий действие на ротор . Такие модели не очень востребованы и их редко можно встретить на промышленных предприятиях . А вот магнитоэлектрические моторы встречаются повсеместно . Но и они имеют свою собственную классификацию , разделяясь на такие виды приводов :
- работающие от постоянного тока ;
- работающие от переменного тока .
Впрочем , в современном мире существуют и универсальные движки , работающие как на постоянном , так и на переменном токах с высоким КПД электродвигателя .
![]()
Электроприводы постоянного тока
В эту категорию относятся изделия , где смена фаз происходит непосредственно в моторе . Из — за этой особенности КПД электрического движка высоко , а сами модели могут легко работать с постоянным или переменным напряжением .
Выбор электродвигателя под конкретные задачи осуществляется по специфике смены фаз в устройствах , а также присутствию обратной связи . По этим параметрам выделяют такие виды движков :
- коллекторные . Изделия могут обладать независимым возбуждением или авто — возбуждением ( параллельным , последовательным , универсальным самовозбуждением ). Как правило , в изделиях коллекторный узел отвечает за синхронную смену цепочек подвижной части мотора . Отметим , что данный элемент крайне труден в обслуживании мотора , а значит при неисправности будут трудности с ремонтом ;
- вентильные ( другая маркировка движков данного типа — бесколлекторные ). В таких устройствах переключение фаз происходит с использованием специальных инверторов . Устройства имеют функцию обратной связи с применением датчика положения ротора или же обладают свойствами асинхронного электромотора ( привода с короткозамкнутым ротором ).
Если вы думаете , что на этом подбор видов двигателей заканчиваеются , спешим вас разуверить , это не так . Мы продолжаем обзор и переходим к следующим видам .
![]()
Электроприводы пульсирующего тока
Высокий КПД электромотора данного типа достигается за счет особенностей его питания . Происходит оно при помощи пульсирующего тока . Строение и назначение привода схоже с аналогом , работающим от постоянного напряжения . Разница лишь в том , что здесь используются шихтованные детали в остове , большее количество полюсов и наличие компенсационной обмотки . Где применяются изделия данного типа ? Очень часто их можно увидеть на электровозах , оснащенных оборудованием для выпрямления переменного тока .
Электромоторы переменного тока
Как становится понятным из названия , питание в таких моделях происходит за счет переменного тока . Такие устройства могут быть как синхронными , так и асинхронными ( для примера — движки с короткозамкнутым ротором ). И , если в первой категории гармоника силы магнитного поля статора соответствует скорости вращения ротора , то в электромоторах , где используется короткозамкнутый ротор , зачастую , движения магнитного поля более частые . Рассмотрим обе эти категории двигателей детальнее .
Синхронные электроприводы могут иметь :
- обмотки возбуждения . Большие мощности — вот где применяются двигатели с такими конструкционными особенностями ;
- постоянные магниты ;
- реактивный , шаговый , гистерезисный , универсальный и другие виды движков .
Есть модели , где используется дискретное угловое перемещение ротора . Это , так называемые , шаговые приводы . В устройствах расположение ротора может быть зафиксировано подачей энергии на определенные обмотки . Смена положений происходит путем сброса напряжения с одних обмоток и перенос энергии на другие .
![]()
Дополнительно можно выделить еще один тип синхронных приводов — вентильный реактивный электромотор . В таком изделии питание обмоток происходит с использованием специальных полупроводниковых элементов .
Что до асинхронного двигателя с короткозамкнутым ротором , то он питается от переменного источника питания и в нем априори различны частоты магнитного поля статора и ротора . Именно такие электромоторы являются самыми популярными и востребованными на сегодняшний день . Модельный ряд изделий , различающихся конструкционными особенностями и КПД электромотора включает такие устройства :
- однофазные . Запуск привода осуществляется в ручном режиме . В изделиях используется пусковая обмотка , фазосдвигающая цепочка или полюса с дополнительным экранированием ;
- двухфазные ( к данной категории относятся и конденсаторные приводы );
- трёхфазные и многофазные изделия .
А мы продолжаем рассматривать другие , менее распространенные виды движков .
Коллекторный движок универсального типа
Устройство способно работать как на постоянном , так и переменном источниках питания . Производится привод только с последовательной обмоткой возбуждения из расчета мощности до 200 Вт . Статор изготавливается из отдельных пластин , в конструкции используется специальной электротехническая сталь .
Обмотка возбуждения начинает работу только частично при наличии переменного источника напряжения и работает в полную меру при постоянном . Где применяются модели данного типа : очень часто их можно встретить в бытовой технике или же электрических инструментах . Минусы у модели есть — КПД электрического двигателя невысокий , но его с избытком хватает для решения технических задач , так что вряд ли это можно считать полноценным недостатком .
Синхронный электропривод возвратно — поступательного движения
Принцип действия электрического двигателя следующий : ротор выполнен в виде магнитов , которые установлены на штоке . Переменный ток проходит через неподвижные обмотки и , вследствие данной процедуры , на магниты воздействует сила магнитного поля , производимой обмотками , что позволяет перемещать шток возвратно — поступательными движениями .
![]()
Области применения электродвигателей
На сегодняшний день электроприводы — это главные потребители энергетики . Практически половина всей потребляемой энергии в мире приходится на самые разнообразные модели электромоторов . Электроприводы крайне востребованы во всех сферах нашей жизни , в промышленных отраслях и бытовом использовании . Давайте рассмотрим , где применяются электромоторы :
- промышленная отрасль : шлифовальное , металлообрабатывающее , деревообрабатывающее насосное , конвейерное , компрессорное оборудование , вентиляторы , производство автомобилей и другой техники ;
- сфера строительства строительство : устройства выступают компонентами лебедок , талей , кранов и прочего подъемно — транспортного оборудования , используются в лифтовых системах , узлах отопления , вентилирования и кондиционирования воздуха ( функционируют за счет крыльчатки электрического двигателя );
- бытовая техника : холодильники , пылесосы , комплектующие для ПК и ноутбуков ( HDD — диски , кулеры ), системы климат — контроля и кондиционеры , стиральные машины , миксеры и т . д .
Как видим , эксплуатация электроприводов распространена повсеместно .
Преимущества электроприводов
В завершение хотелось бы отметить главные достоинства двигателей , обеспечившие им такую популярность . Среди них :
- простота конструкции ;
- высокая ремонтопригодность ;
- большой выбор устройств с различной мощностью под любое оборудование , разные технические и бытовые задачи ;
- простота и удобство регулировки скорости вращения вала движка ;
- возможность автоматического управления устройствами ;
- быстродействие моторов ;
- постоянная готовность к старту ;
- возможность применения реверсивного ( обратного ) вращения ;
- для монтажа и техосмотра устройств не обязательны дорогостоящие услуги квалифицированных специалистов ;
- долгий срок эксплуатации ;
- высокий КПД ;
- устройства являются экологически чистым продуктом — они не загрязняют окружающую среду и не вредят здоровью человека .
Но главное преимущество электрического привода перед всеми прочими — его действия можно контролировать и регулировать на большом расстоянии от источника энергии и от устройства включения — выключения . Электромотор не создает такого шума и не несет прямой опасности для рабочих , как механические аналоги .
![]()
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом при этом является выделение тепла.
- 1 Принцип действия
- 1.1 Принцип действия трехфазного асинхронного электродвигателя
- 2.1 Двигатели постоянного тока
- 2.2 Двигатели переменного тока
- 2.3 Универсальный коллекторный электродвигатель
- 2.4 Синхронный электродвигатель возвратно-поступательного движения
- Двигатель Шраге-Рихтера
Принцип действия
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТКН которые повсеместно используются в крановых установках.
Принцип действия трехфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует ЭДС), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется cкольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.
![]()
Трёхфазный двухполюсный асинхронный двигатель
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока
![]()
При частоте 50 Гц получаем для P=1, 2, 3 (двух-, четырех- и шести-полюсных машин) синхронные частоты вращения поля Nc = 3000, 1500 и 1000 об/мин.
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и закорачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Классификация электродвигателей
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
![]()
Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- Коллекторные двигатели;
- Бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- Двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- Двигатели с самовозбуждением.
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением (обмотка якоря включается параллельно обмотке возбуждения);
- Двигатели последовательного возбуждения (обмотка якоря включается последовательно обмотке возбуждения);
- Двигатели смешанного возбуждения (часть обмотки возбуждения включается последовательно с якорем, а вторая часть - параллельно обмотке якоря или последовательно соединённым обмотке якоря и первой обмотки возбуждения, в зависимости от требуемой нагрузочной характеристики).
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.
Двигатели переменного тока
Трехфазные асинхронные двигатели
![]()
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полемпитающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
- однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь;
- двухфазные — в том числе конденсаторные;
- трёхфазные;
- многофазные; Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127, 220 В, для постоянного 110, 220 В.
Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 Гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы).
При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока. Строго говоря, универсальный коллекторный двигатель является коллекторным электродвигателем постоянного тока с последовательно включенными обмотками возбуждения (статора), оптимизированным для работы на переменном токе бытовой электрической сети.
Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону. Для возможности работы на переменном токе применяется статор из магнитно-мягкого материала, имеющего малый гистерезис (сопротивление перемагничиванию).
Для уменьшения потерь на вихревые токи статор выполняют наборным из изолированных пластин. Особенностью (в большинстве случаев — достоинством) работы такого двигателя именно на переменном токе (а не на постоянном такого же напряжения) является то, что в режиме малых оборотов (пуск и перегрузка) индуктивное сопротивление обмоток статора ограничивает потребляемый ток и соответственно максимальный момент двигателя (оценочно) до 3—5 от номинального (против 5—10 при питании того же двигателя постоянным током).
Для сближения механических характеристик у двигателей общего назначения может применяться секционирование обмоток статора — отдельные выводы (и меньшее число витков обмотки статора) для подключения переменного тока.
Синхронный электродвигатель возвратно-поступательного движения
Принцип его работы заключается в том, что подвижная часть двигателя представляет собой постоянные магниты, закреплённые на штоке. Через неподвижные обмотки пропускается переменный ток и постоянные магниты под действием магнитного поля, создаваемого обмотками, перемещают шток возвратно-поступательным образом
Двигатель Шраге-Рихтера
Трёхфазный коллекторный асинхронный двигатель с питанием со стороны ротора.
Таким образом, переставляя при помощи механического устройства (штурвал или иное исполнительное устройство) щёточные траверсы являлось возможным весьма экономично управлять скоростью асинхронного двигателя переменного тока. Идея управления в общем предельно проста и будет реализована впоследствии в так называемых асинхронно-вентильных каскадах, где в цепь фазного ротора включали тиристорный преобразователь, работавший инвертором или в выпрямительном режиме.
Сущность идеи — во вторичную цепь асинхронного двигателя вводится добавочная ЭДС изменяемой амплитуды и фазы с частотой скольжения. Задачу согласования частоты добавочной ЭДС с частотой скольжения ротора выполняет коллектор. Если добавочная ЭДС противонаправлена основной, производится вывод мощности из вторичной цепи двигателя с соответствующим уменьшением скорости машины, ограничение скорости вниз диктуется только условиями охлаждения обмоток).
В точке синхронизма машины частота добавочной ЭДС равна нулю, то есть во вторичную цепь коллектором подаётся постоянный ток. В случае суммирования добавочной ЭДС с основной производится инвертирование добавочной мощности во вторичную цепь машины, и соответственно — разгон выше синхронной частоты вращения. Таким образом, результатом регулирования являлось семейство достаточно жестких характеристик с уменьшением критического момента при снижении скорости, а при разгоне выше синхронной скорости — с его пропорциональным увеличением.
Определенный интерес представляет собой работа машины с несимметричным раствором щеточных траверс. В этом случае векторная диаграмма добавочной э.д.с. двигателя получает так называемую тангенциальную составляющую, делающую возможным работу с ёмкостной реакцией на сеть.
ООО "Агрегат-Электропром" занимается ремонтом электродвигателей в Москве с 1995 года и является одним из ведущих предприятий в области ремонта электрических машин, перемотке двигателей и трансформаторов.
Читайте также:
- Как откликнуться на вакансию на труд всем
- Трудовой кодекс рф как правовая основа делопроизводства предусматривает структуру и содержание
- Какие отчеты сдавать при приеме на работу сотрудника в 2021
- Справка для работы в условиях крайнего севера
- В случае направления в служебную командировку работодатель обязан возмещать работнику