
Расстояние до радиолокационного маяка ответчика определяется как расстояние
Обновлено: 02.07.2024
Для решения задач навигации летательных аппаратов (ЛА) широкое применение находят угломерно-дальномерные радионавигационные системы (УДРНС), которые являются комбинированными радионавигационными системами (РНС) и входят в состав КСН.
Под комбинированными понимают такие РНС, в которых либо используется комбинация параметров электромагнитного поля для измерения навигационных параметров (НП), либо определяется комбинация независимых НП. В комбинированных РНС измерители каждого НП функционируют независимо.
Примерами комбинированных РНС, в частности, являются УДРНС ближней навигации (РСБН), включающие в себя наземные радиомаяки типа отечественных РСБН-4Н, Е-329 c бортовой аппаратурой РСБН-7С, А-324 и зарубежные VOR/DME, TACAN.
Областями боевого применения УДРНС являются: обеспечение вождения ЛА по маршруту (определение текущих координат) путем измерения азимута и дальности относительно наземного азимутально-дальномерного радиомаяка (АДРМ); управление воздушным движением (УВД); возврат ЛА в зону аэродрома посадки, выполнения предпосадочного маневра с заходом на ВПП со снижением до высоты 30. 60 м при различных видах пилотирования (автоматическом, полуавтоматическом и ручном).
По принципу действия УДРНС (РСБН) делятся на фазовременные и временные. В фазовременных УДРНС информация об азимуте ЛА заложена в фазе огибающей принятых амплитудно-модулированных сигналов, а о дальности до АДРМ - во времени запаздывания этих сигналов. Примерами фазовременных УДРНС являются зарубежные РСБН типа VOR/DME, использующие в азимутальном канале непрерывные амплитудно-модулированные колебания, и TACAN, в которых применяются импульсные колебания. Во временных УДРНС определение текущего расстояния от ЛА до наземного АДРМ (или ответчика радиодальномера) и текущего азимута ЛА, отсчитываемого относительно истинного меридиана, проходящего через точку установки наземного АДРМ, осуществляется временным методом (точнее, амплитудно-временным).
Здесь и далее будем рассматривать УДРНС на примере РСБН, которая состоит из наземного АДРМ и бортового оборудования ЛА.
Наземные АДРМ обеспечивают работу бортового оборудования РСБН и дают возможность наблюдать на контрольных индикаторах кругового обзора (ИКО) и выносных индикаторах кругового обзора (ВИКО) на командно-диспетчерских пунктах (КДП) за положением ЛА, пользующихся РСБН, определять их координаты и осуществлять индивидуальное опознавание.
Наземные АДРМ Е-329 кроме ненаправленного (всенаправленного) режима работы, который есть у всех наземных радиомаяков типа РСБН-2Н, РСБН-4Н, имеют направленный режим. В этом режиме передача и прием всех радиосигналов осуществляется одной вращающейся направленной антенной в момент совпадения ее диаграммы направленности (ДН) с направлением на ЛА. Кроме того, непрерывный азимутальный сигнал заменяется импульсным с периодом повторения радиоимпульсов, соответствующим времени поворота азимутальной антенны на угол 0,25 0 .
Системы РСБН работают в дециметровом диапазоне радиоволн и имеют от 40 до 176 частотно-кодовых каналов (ЧКК) в зависимости от модификаций наземной и бортовой аппаратуры. Пропускная способность современных РСБН по азимутальному каналу неограниченная, а по дальномерному каналу составляет 100-200 ЛА. Максимальная дальность действия определяется высотой полета ЛА и рельефом местности и не превышает 450. 560 км. Эту дальность в километрах можно рассчитать по формуле
где Н1 и Н2 - соответственно высота антенны УДРМ и высота полета ЛА в метрах. Минимальная дальность действия обычно равна высоте полета ЛА и определяется формой ДН АДРМ в
1.2. Принципы построения временной угломерно-дальномерной РНС
и определения местоположения ЛА
В отечественных радиотехнических системах ближней навигации измерение наклонной дальности на борту ЛА до наземного радиомаяка осуществляется методом радиолокации с активным ответом. Дальность определяется путем измерения на ЛА времени распространения запросного сигнала до наземного радиомаяка и от маяка до ЛА (tД). Это время с достаточной степенью точности преобразуется в отсчет дальности до радиомаяка, т. е.
где с - скорость распространения радиоволн; Д - дальность от ЛА до наземного радиомаяка.
Отсчет дальности производится по цифровому табло прибора. Для повышения помехозащищенности канала дальности в РСБН радиосигнал передается специальным двухимпульсным кодом на определенной частоте.
Азимут на ЛА определяется по сигналам наземного азимутального радиомаяка временным способом. Азимут определяется путем измерения времени от момента направления азимутальной антенны направленного действия на север до момента, когда диаграмма направленности совпадает с направлением на ЛА, т. е. до облучения ею ЛА. Зная указанное время tφи скорость вращения азимутальной антенны Ω, можно определить азимут ЛА φ, т. е.
Для измерения азимута на ЛА азимутальный радиомаяк излучает два вида сигналов: опорные и азимутальные.
Для измерения азимута на ЛА кроме опорных сигналов наземный радиомаяк вырабатывает непрерывные азимутальные сигналы, которые излучаются в пространство вращающейся азимутальной двухлепестковой антенной остронаправленного действия. Антенна вращается со скоростью 100 об/мин и последовательно облучает все самолеты, находящиеся в зоне действия радиомаяка.

Рис. 1. Определение азимута временным методом
Азимут самолета φ прямо пропорционален измеренному времени tφ, умноженному на скорость вращения антенны Ω. Следовательно, и точность измерения азимута будет зависеть от этих параметров.
Для повышения точности измерения азимута используют постоянную скорость вращения антенны и защиту азимутальной антенны от влияния ветра специальным ветрозащитным колпаком.
1. Радиолокационный маяк-ответчик, содержащий многоотводный приемник с различными порогами срабатывания, соединенный с ним блок декодирования и формирователь ответных сигналов, выход которого соединен с входом передатчика, отличающийся тем, что, с целью повышения быстродействия и точности определения координат в системе РЛС-маяк , а также повышения скрытности работы маяка, в него введены последовательно соединенные схема поимпульсного сравнения амплитуд, схема выдержки времени, схема запоминания максимальной амплитуды, схема автоматического выбора отвода, схема селекции, выход которой подключен к входу формирователя ответных сигналов, второй выход схемы запоминания максимальной амплитуды подключен к входу схемы поимпульсного сравнения амплитуд, выход блока декодирования подключен к другим входам схемы селекции и схемы поимпульсного сравнения амплитуд, многоотводные выходы приемника подключены к второму входу схемы автоматического выбора отвода и к третьему входу схемы поимпульсного сравнения амплитуд, второй выход которой соединен с вторым входом схемы запоминания максимальной амплитуды.
2. Устройство по п.1, отличающееся тем, что число отводов приемника n определяется по формуле
но не превышающим максимального значения
где Д - возможный динамический диапазон принимаемых сигналов,
А(р) - размах флюктуаций затухания по выбранному уровню вероятности, причем перепад порогов срабатывания по разным отводам установлен одинаковым для всех смежных порогов.
Описание
При проектировании маяков, предназначенных для работы с уже разработанными и установленными на различных носителях РЛС, практически приемлемы лишь такие методы исключения мешающего влияния боковых лепестков запросчика, которые могут быть реализованы за счет выбора построения только аппаратуры маяка-ответчика и не связаны с внесением изменений в схемы и конструкции РЛС В этом отношении из известных устройств наиболее близким по технической сущности к предлагаемому является устройство, обеспечивающее реализацию способа.
Здесь исключение влияния боковых лепестков осуществляется за счет использования в приемнике маяка-ответчика дополнительного канала с чувствительностью на 20-30 дБ меньшей, чем основного. При этом сигналы, прошедшие дополнительный канал приемника маяка-ответчика, выводятся на экран индикатора запрашивающей РЛС с измененными относительно основного канала начальной задержкой либо интервалами между импульсами отметки ответа.
Для реализации описанного способа требуется устройство, в состав которого кроме антенных устройств, приемно-декодирующего, кодирующего и передающего устройств ответчика должны быть включены декодирующее и кодирующее (либо линия задержки) устройства дополнительного менее чувствительного приемного канала ответчика, приемник линии ответа и индикатор на запросчике. Выделение главного лепестка диаграммы направленности производится оператором по экрану индикатора РЛС-запросчика, т.е. не автоматически. При этом работа оператора РЛС-запросчика несколько затруднена ввиду необходимости визуального различения на экране кодов отметки главного лепестка от примыкающих отметок боковых лепестков; кроме того, сектор приема сигналов ответа по боковым лепесткам может быть значительно шире главного лепестка, что ухудшает условия наблюдаемости целей.
Ввиду недостаточной точности определения момента облучения главным лепестком диаграммы направленности запросчика на ответчике и необходимости произведения дополнительных действий оператором РЛС-запросчика в условиях сложной боевой обстановки не всегда обеспечиваются необходимые точность и быстродействие. Кроме того, двухканальное (двухпороговое) построение аппаратуры ответчика не позволяет стабилизировать ширину сектора приема ответных сигналов по главному лепестку и достаточно надежно исключить ложные срабатывания за счет приема боковых лепестков при работе в широком диапазоне дальностей от 20-30 км до радиогоризонта, особенно с учетом флюктуаций затухания сигналов, которые за период обзора антенны запросчика могут составлять в сантиметровом диапазоне до 6-8 дБ по 80% уровню вероятности.
Таким образом, основные недостатки реализуемого устройства сводятся к следующему:
- выделение главного лепестка диаграммы направленности антенны запрашивающей РЛС (исключение мешающего влияния боковых лепестков) производится в аппаратуре запросчика оператором (в результате визуального различения отметок главного и бокового лепестков и последующего считывания координат), что снижает быстродействие и точность привязки (определения взаимных координат);
- излучения ответчика производятся при облучении его главным и боковыми лепестками, т.е. в течение времени, значительно (в несколько раз) превышающего необходимое, соответствующее облучению только главным лепестком, что снижает скрытность носителя маяка-ответчика и помехозащищенность связи, увеличивает энергорасход и снижает ресурс маяка;
- принятое в прототипе двухканальное (двухпороговое) построение приемного устройства, независимо от выбора соотношения между чувствительностями по этим порогам, не обеспечивает достоверного выделения главного лепестка и стабилизацию ширины соответствующей ему отметки в РЛС при работе во всем возможном диапазоне дальностей, особенно с учетом флюктуаций затухания сигнала на трассе распространения.
Поставленная цель достигается благодаря стабилизации уровня срабатывания ответчика по главному лепестку и исключения ответа по боковым лепесткам запросчика, обеспечиваемым за счет введения в состав радиолокационного маяка-ответчика, содержащего многоотводное приемное устройство с различными порогами срабатывания, соединенное с ним устройство декодирования, формирователь ответных сигналов и передатчик пяти дополнительных последовательно соединенных схем - поимпульсного сравнения амплитуд сигналов, выдержки времени, запоминания максимальной амплитуды, автоматического выбора отвода и селекции, причем выход схемы селекции подключен к формирователю ответных сигналов, второй выход схемы запоминания максимальной амплитуды подключен к входу схемы, поимпульсного сравнения амплитуд сигналов, выход устройства декодирования подключен к другим входам схемы селекции и схемы поимпульсного сравнения амплитуд, выход приемного устройства подключен к второму входу схемы автоматического выбора отвода и третьему входу схемы поимпульсного сравнения амплитуд, а второй выход поимпульсного сравнения амплитуд соединен со вторым входом схемы запоминания максимальной амплитуды, а также за счет выбора числа отводов n и величин перепадов порогов срабатывания в приемном устройстве в соответствии с максимальным динамическим диапазоном сигналов запроса Д и размахом флюктуации сигнала по выбранному уровню вероятности А(р), удовлетворяющим соотношению , причем перепад порогов срабатывания по разным отводам устанавливается одинаковым для всех смежных порогов.
Блок-схема предлагаемого маяка-ответчика приведена на чертеже.
Радиолокационный маяк-ответчик содержит схему поимпульсного сравнения амплитуд 1 (СПСА), приемное устройство 2 (ПрУ), устройство декодирования 3 (УДК), схему запоминания максимальной амплитуды 4 (СЗМА), схему выдержки времени 5 (СВВ), схему автоматического выбора отвода 6 (САВО), схему селекции 7 (СС), формирователь ответных сигналов 8 (ФОС) и передатчик 9 (П).
На вход СПСА (1) поступают сигналы по всем отводам с выхода приемника (2). Для повышения помехозащищенности в СПСА (1) производится селекция запросных сигналов сигналами, прошедшими через УДК (3), подключенное к самому чувствительному отводу ПрУ (2). Проселектированный сигнал передается на СЗМА (4), где запоминается по каждому отводу. Запомненные в СЗМА (4) сигналы подаются в СПСА (1), где в момент прихода нового принятого ПрУ (2) сигнала происходит поимпульсное сравнение его на выходе каждого из отводов с ранее запомненным. В случае приема по очередному отводу сигнала, которого ранее не было в памяти СЗМА (4), сигнал запоминается по этому отводу и в СВВ (5) начинается отсчет времени. Обновление начала отсчета времени осуществляется каждый раз при превышении принятым импульсом уровня (по номеру отвода), запомненного ранее СЗМА (4). По истечении времени, равного примерно половине периода вращения антенны запросчика, т.е. большего времени между облучением боковым лепестком и главным лепестком, счет времени в СВВ (5) прекращается и выдается команда в СЗМА (4) на перепись хранящегося в памяти уровня сигнала в САВО (6), где сигнал хранится до следующей команды на перепись. Таким образом, в СЗМА (4) осуществляется поиск максимального по амплитуде сигнала, соответствующего уровню сигнала в максимуме диаграммы направленности запрашивающей РЛС, этот сигнал переписывается в САВО (6) и удерживается там примерно на период вращения антенны.
После переписи память СЗМА (4) освобождается и осуществляется новый цикл поиска максимальной амплитуды сигнала, т.е. максимума диаграммы направленности.
В САВО (6) по запомненной информации об уровне при поступлении с отводов приемника (1) сигналов выбирается один отвод, для которого уровень сигнала отличается от максимального запомненного примерно на величину половины перепада между коэффициентом усиления в главном и боковых лепестках диаграммы направленности антенны. Сигналы по выбранному отводу подаются на схему селекции (7), где осуществляется выделение сигналов, имеющих требуемый код запроса. Сигналы, прошедшие (7), запускают ФОС (8) и П (9). Число отводов приемника (2) установлено не меньшим значения отношения возможного динамического диапазона сигналов к полуразмаху флюктуаций по выбранному уровню вероятностей. Таким образом, указанное взаимодействие отдельных схем приводит к автоматическому выбору и стабилизации уровня принятого сигнала так, что обеспечивается срабатывание ответчика при его запросе главным лепестком диаграммы направленности.
Уменьшение ошибок привязки приводит к снижению суммарных ошибок, например, в системах целеуказания, что в свою очередь позволит более точно выполнить прицеливание и уменьшить расход средств поражения (ракет и пр.), чем повышается качество всей аппаратуры.
Повышение скрытности особенно важно при размещении ответчика на подводной лодке, работающей в системе целеуказания, и увеличивает боевую ее устойчивость.
Пеленгаторная антенна судна может определять направление на радиомаяк, сигнал которого она принимает. Сигнал радиомаяка содержит позывной код, по которому можно установить местоположение маяка. Отсчитывая курс по компасу, штурман проводит линию положения (см. выше). Точкой пересечения двух таких линий определяются координаты судна.
Точность пеленгации по радиомаякам невелика на большом удалении от них, но приемлема - на малом. Преимуществом ручных пеленгаторных приемников (радиополукомпасов) является их дешевизна. В авиации обычно применяются автоматические радиопеленгаторы, или радиокомпасы.
Системы измерения азимута и расстояния. Оборудование этой категории дает основную маршрутную информацию для воздушной навигации. Зная азимут известной наземной радиостанции, пилот может держать на нее курс и при этом видеть на индикаторе расстояние до нее. Перестраиваясь с одной станции на другую, он может проследовать "вслепую" в любую точку назначения.
Информацию об азимуте дает всенаправленный курсовой радиомаяк УКВ-диапазона VOR (VHF Omnidirectional Range). Радиомаяк VOR передает два сигнала, разность фаз которых является прямой мерой его азимута относительно направления на север, причем показания компаса не требуются. ВВС и ВМФ США разработали другую систему определения азимута как часть своей радионавигационной системы ближнего действия "Такан" (TACAN - Tactical Air Navigation). Погрешность (стандартное отклонение) системы VOR немногим меньше 1?, а погрешность системы "Такан" - около 0,5?.
Гражданские и военные радиомаяки США используют однотипное дальномерное оборудование DME (Distance Measuring Equipment). Расстояние от пользователя до радиомаяка определяется по измеренному времени, за которое сигнал пользователя доходит до радиомаяка, вызывает срабатывание ответчика (принимающего, усиливающего и снова передающего сигнал) и возвращается обратно. Время измеряется как интервал между переданным и принятым импульсами. Точность определения расстояний - около 400 м. В тех случаях, когда одно и то же оборудование DME используется для радиомаяков VOR и TACAN, система обозначается аббревиатурой VORTAC.
Точные измерения изменений дальности за малые интервалы времени лежат в основе наземного слежения за космическими летательными аппаратами. На станциях слежения используются большие антенны и атомные часы (в качестве стандартов частоты). Изменения дальности определяются по изменению фазы сигнала, пришедшего от бортового ответчика КЛА.
Соседние слова
К статье НАВИГАЦИЯ: РАДИОТЕХНИЧЕСКИЕ МЕТОДЫ НАВИГАЦИИ Пеленгаторная антенна судна может определять направление на радиомаяк, сигнал которого она принимает. Сигнал радиомаяка содержит позывной код, по которому можно установить местоположение маяка. Отсчитывая курс по компасу, штурман проводит линию положения (см. выше ). Точкой пересечения двух таких линий определяются координаты судна. Точность пеленгации по радиомаякам невелика на большом удалении от них, но приемлема - на малом. Преимуществом ручных пеленгаторных приемников (радиополукомпасов) является их дешевизна . В авиации обычно применяются автоматические радиопеленгаторы, или радиокомпасы. Системы измерения азимут а и расстояния. Оборудование этой категории дает основную маршрутную информацию для воздушной навигации. Зная азимут известной наземной радиостанции, пилот может держать на нее курс и при этом видеть на индикаторе расстояние до нее. Перестраиваясь с одно й станции на другую, он может проследовать "вслепую" в любую точку назначения. Информацию об азимуте дает всенаправленный курсовой радиомаяк УКВ-диапазона VOR (VHF Omnidirectional Range). Радиомаяк VOR передает два сигнала, разность фаз которых является прямой мерой его азимута относительно направления на север , причем показания компаса не требуются. ВВС и ВМФ США разработали другую систему определения азимута как часть своей радионавигационной системы ближнего действия "Такан" (TACAN - Tactical Air Navigation). Погрешность (стандартное отклонение ) системы VOR немногим меньше 1?, а погрешность системы "Такан" - около 0,5?. Гражданские и военные радиомаяки США используют однотипное дальномерное оборудование DME (Distance Measuring Equipment). Расстояние от пользователя до радиомаяка определяется по измеренному времени , за которое сигнал пользователя доходит до радиомаяка, вызывает срабатывание ответчика (принимающего, усиливающего и снова передающего сигнал) и возвращается обратно . Время измеряется как интервал между переданным и принятым импульсами. Точность определения расстояний - около 400 м. В тех случаях, когда одно и то же оборудование DME используется для радиомаяков VOR и TACAN, система обозначается аббревиатурой VORTAC. Точные измерения изменений дальности за малые интервалы времени лежат в основе наземного слежения за космическими летательными аппаратами. На станциях слежения используются большие антенны и атомные часы (в качестве стандартов частоты). Изменения дальности определяются по изменению фазы сигнала, пришедшего от бортового ответчика КЛА.


Для надежного определения места с помощью РЛС необходимо быть уверенным в правильном опознании объектов, наблюдаемых на экране индикатора.Наиболее точно могут быть опознаны объекты, называемые точечными ориентирами.
К ним относятся обозначенные на карте небольшие островки, отдельно лежащие камни, скалы, плавучие знаки навигационного ограждения, оконечности молов и причалов, а также радиолокационные маяки-ответчики.Хорошее изображение, отвечающее по форме очертаниям берега на карте, дают высокие обрывистые берега.
Такой берег может быть опознан достаточно уверенно. Низменные песчаные мысы, плоское побережье, покрытые снегом пологие берега, плавучий лед рассеивают энергию и могут не давать эхо-сигналов.
В результате этого возвышенные полуострова, соединяющиеся с основным берегом низкими перешейками, могут изображаться на экране РЛС как острова.
Если мыс имеет пляж, за которым лежит обрывистый склон, то при пеленговании или измерении расстояния до такого мыса легко ошибиться, так как урез воды на определенных расстояниях радиолокатор не обнаружит.
Ошибки при измерении расстояний до берега особенно вероятны в морях, имеющих низкие берега и значительные колебания уровня воды. Обычно уже на расстоянии от 15 до 8 миль изображение на экране индикатора достаточно верно передает очертания береговой черты, что позволяет сопоставлять его с картой.
Для определения места могут быть использованы радиолокационные расстояния до опознанных на экране РЛС объектов или пеленги этих объектов.
Радиолокационное измерение расстояний в большинстве случаев производится с помощью подвижного круга дальности (ПКД). Расстояние до объекта можно определить также на глаз по неподвижным кругам дальности (НКД).
При этом способе ошибка расстояния составляет в среднем 0,1 интервала между соседними кругами. Для повышения точности наблюдений расстояния следует измерять до выдающихся частей берега, направленных к судну.
Радиолокационные пеленги измеряют при помощи механического или электронного визира, устанавливаемого над серединой эхо-сигнала. Истинный пеленг на объект находят затем путем исправления радиолокационного .пеленга поправкой гирокомпаса.
Если РЛС не имеет ориентации по норду, то измеряют КУ эхо-сигнала, который переводят в ИП.
Пеленги следует брать на обрывистые оконечности, направленные перпендикулярно к визирной плоскости. Ошибка в пеленге будет тем меньше, чем дальше располагается эхо-сигнал от центра экрана, поэтому при взятии пеленгов следует использовать шкалу наиболее крупного масштаба.
В большинстве случаев точность радиолокационного измерения расстояний значительно выше точности радиолокационного пеленгования, что необходимо иметь в виду при определении места судна. Только на малых расстояниях, не превышающих 0,5 мили, линия пеленга не уступает по точности измеренному расстоянию.
Определение места судна по радиолокационным расстояниям. Если на экране РЛС можно выбрать два или три удачно расположенных точечных или характерных ориентира, то место судна может быть получено по измеренным до этих ориентиров радиолокационным расстояниям.
Проведя радиолокационные наблюдения, находят на карте ориентиры, соответствующие эхо-сигналам, от которых наносят вблизи счислимого места судна засечки радиусами, равными измеренным расстояниям в масштабе карты. Место судна получают в пересечении засечек (рис. 1, а).
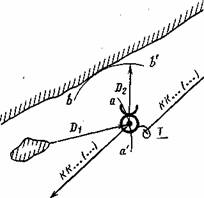
Если на экране индикатора имеется изображение ровной береговой черты, не имеющей характерных выступающих мысов, и одного точечного ориентира, то место судна получают следующим приемом (рис. 1,)
б).Измерив расстояние D1 до точечного объекта, подводят подвижной круг дальности касательно к кромке берега, т. е. измеряют кратчайшее расстояние D2 до береговой черты. От точечного ориентира радиусом D1 проводят на карте дугу аа/. Взяв циркулем расстояние D2, находят на дуге аа/ такое положение острия циркуля, при котором карандаш опишет окружность bb/,касательную к береговой черте.
Место накола острия циркуля будет соответствовать положению судна. Полученную с помощью РЛС обсервованную точку обозначают кружком с полукругом над ним.
Во всех случаях судоводитель должен стремиться определять место судна по трем расстояниям, что дает возможность по величине треугольника погрешностей выявить возможные ошибки в наблюдениях или опознании объектов.
Для уменьшения ошибок от неодновременного измерения расстояний рекомендуется первыми измерять расстояния до объектов, находящихся вблизи траверза. В последнюю очередь измеряют расстояние до ориентиров, расположенных на курсовых углах, близких к 0 и 180°, замечая время и отсчет лага.
Определение места судна:
а - по радиолокационным расстояниям; б - по точечному ориентиру и ровной береговой черте
Определение места судна по радиолокационному расстоянию и визуальному пеленгу
На практике широко применяют комбинированный способ определения места по радиолокационному расстоянию и визуальному пеленгу. Если пеленг и расстояние измерены до одного и того же точечного ориентира, то определение места выполняется в том же порядке, что и при визуальных наблюдениях. Часто пеленгуемый маяк располагается на мысу в некотором удалении от берега.
Тогда расстояние на экране РЛС измеряется не до маяка, а до лежащей перед ним береговой черты. В этом случае измеренное расстояние откладывают по линии пеленга от уреза воды.
Когда в районе пеленгуемого объекта берег не имеет характерных ориентиров, измеряют кратчайшее расстояние Dдо береговой черты. Исправив и проложив на карте линию визуального пеленга(рис. 2), растворяют ножки циркуля в масштабе карты на расстояние D. Находят такое положение острия циркуля на линии пеленга, при котором вторая ножка опишет дугу, касательную к береговой черте. Место судна будет находиться в точке накола острия циркуля.
Радиомаяки и их типы
Морские радиомаяки представляют собой радиопередающие устройства, имеющие строго фиксированное положение и передающие в соответствии с расписанием присвоенные им позывные и специальные радиосигналы.
В практике судовождения применяются радиомаяки с ненаправленной или направленной характеристиками излучения. В первом случае для их использования на судне требуется радиопеленгатор, во втором достаточно наличие обычного судового приёмника соответствующего диапазона. Основным параметром, определяющим тип радиомаяка, является его характеристика излучения.
Наиболее широко используются следующие типы:
1. Радиомаяки кругового излучения (ненаправленные);
2. Створные радиомаяки;
3. Секторные радиомаяки;
4. Радиомаяки с вращающейся характеристикой направленности.
Радиомаяки кругового излучения предназначаются для обеспечения навигационных определений в море с помощью судовых радиопеленгаторов. Маломощные маркерные радиомаяки используются, как правило, для обозначения навигационных опасностей или других пунктов, на которых они установлены.
Створные радиомаяки предназначаются для обеспечения вождения судов по прямолинейным фарватерам. Принцип их действия основан на использовании метода равносигнальной зоны. Вождение по зоне осуществляется путём удержания судна в пределах зоны равной слышимости двух сигналов, передающих в "переплёт".
Секторные радиомаяки с веером вращающихся равносигнальных зон по сравнению с обычными круговыми радиомаяками обладают рядом преимуществ и отличают от последних принципом действия, эксплуатационными данными и методикой использования.
Достоинства секторных радиомаяков: большая дальность действия, повышенная точность пеленгования и, самое главное, отсутствие потребности в специальной аппаратуре на судне, не считая средневолнового приёмника или радиопеленгатора.
При плавании вблизи берегов возникают трудности выделения и опознания сигналов навигационного знака на фоне сигналов от береговой черты или плавмаяка на фоне отметок судов.
Радиолокационный маяк ответчик (РМО) представляет собой устройство, при поступлении, на вход которого импульсов судовой РЛС излучаются ответные импульсы или их кодовое сочетание. Ответные сигналы воспроизводятся на экране РЛС, позволяя определить местоположение и принадлежность маяка.
В настоящее время получили широкое распространение РМО с медленной перестройкой рабочей частоты в диапазоне 9320 - 9500 МГц (3 см) используемой для работы судовых РЛС всего мирового флота. Сигналы РМО наблюдаются только в те промежутки времени, когда частота РМО совпадает с частотой РЛС. Период изменения частоты РМО составляет 1,5 - 2 мин. Поэтому сигналы РМО наблюдаются в течение 2 - 3 оборотов антенны каждые 1,2 - 2 мин.
Сигналы РМО представляется в виде сплошной радиальной линии длительностью около 4 миль.
Дальность их обнаружения в зависимости от технических параметров 15 - 30 миль. При использовании РМО дистанция измеряется по началу отметки, затем учитывается задержка сигнала по характеристике маяка.
Читайте также: