
Чему равна результирующая сила если силы друг друга компенсируют
Обновлено: 02.07.2024
Основу динамики материальной точки составляют три закона Ньютона.
К выводу о существовании явления инерции впервые пришел Галилей, а затем Ньютон. Этот вывод формулируется в виде первого закона Ньютона (закона инерции): существуют такие системы отсчета(инерциальные), относительно которых тело (материальная точка) при отсутствии на нею внешних воздействий (или при их взаимной компенсации) сохраняет состояние покоя или равномерного прямолинейного движения.
ai=Fi/m.Результирующее ускорение точки, находящейся под действием нескольких сил, равно геометрической сумме отдельных ускорений , сообщаемых каждой силой в отдельности. Величина и направление ускорения таковы, как если бы на точку действовала одна сила, равная векторной сумме приложенных сил:
В этих формулах m - масса тела. Вообще, масса тела есть мера его инерции. Величина массы данного тела определяется как отношение силы к ускорению, которая она сообщает телу.
Третий закон связывает между собой силы, с которыми тела действуют друг на друга, а именно: силы, с которыми тела действуют друг на друга, всегда равны по величине и противоположны по направлению.
При этом необходимо обратить внимание на следующее: Силы всегда возникают парами. Если есть одна, то есть и другая, ей противоположная.
Вес тела. Невесомость. Перегрузка [ ]
Определения [ ]
Весом тела называтся сила, действующая на его опору, возникающая в поле силы тяжести.
Невесомостью называется состояние отсутствия у тела веса (далее этот пункт будент пояснен).

Вес тела и невесомость [ ]
Рассмотрим ситуацию, когда тело неподвижно лежит на жесткой опоре, параллельной поверхности Земли. На него действует сила тяжести и сила нормальной реакции опоры (сила упругости, с которой опора действует на тело, и т.к. она жесткая эта сила равна силе тяжести по модулю и противоположна по направлению). Тогда по третьему закону Ньютона, если опора действует на тело, то и тело в свою очередь действует на опору с такой же по модулю силой, но обратной по направлению. Эта сила и называется весом тела. Ее не следует путать с силой тяжести, т.к. эти силы приложены к разным телам.
.
Тогда ускорение свободного падения и собственное ускорение лифта будут положительны.
Будем рассматривать случаи:
- Когда a g, вес тела в ускоренно движущемся лифте больше силы тяжести - тело прижимается к потолку лифта.
- Когда a=g, вес тела обращается в ноль. Тело свободно падает на Землю вместе с кабиной. Такое состояние называется невесомостью.
Законы Кеплера [ ]
Вступление [ ]
С точки зрения земного наблюдателя планеты движутся по весьма сложным траекториям. Первая попытка создания модели Вселенной была предпринята Птолемеем. В центре мироздания Птолемей поместил Землю, вокруг которой по большим и малым кругам, как в хороводе, двигались планеты и звезды.
Геоцентрическая система Птолемея продержалась более 14 столетий и только в середине XVI века была заменена гелиоцентрической системой Коперника. В системе Коперника траектории планет оказались более простыми. Немецкий астроном И. Кеплер в начале XVII века на основе системы Коперника сформулировал три эмпирических закона движения планет Солнечной системы, названных законами Кеплера.
Первый закон Кеплера [ ]
Все планеты движутся по эллиптическим орбитам, в одном из фокусов которых находится Солнце.
Ближайшая к Солнцу точка траектории называется перигелием, точка наиболее удаленная от Солнца – афелием. Расстояние между афелием и перигелием – большая ось эллипса.
Почти все планеты Солнечной системы (кроме Плутона) движутся по орбитам, близким к круговым.
Второй закон Кеплера [ ]
Радиус-вектор планеты описывает в равные промежутки времени равные площади.
Второй закон Кеплера эквивалентен закону сохранения момента импульса.
Третий закон Кеплера [ ]
Квадраты периодов обращения планет относятся как кубы больших полуосей их орбит.
Вывод Ньютона. [ ]
При движении тела по эллипсу (приблизим его к окружности) возникает центростремительное ускорение.
Рассмотрим отношение центоростемительных ускорений двух планет, и получим, что оно равно отношению квадратов радиусов их орбит.
Рассмотрим отношение центоростемительных ускорений двух планет:
Законы сохранения. [ ]
Закон сохранения импульса [ ]
Вступление [ ]
В результате действия силы на тело (материальную точку) возникает ненулевое ускорение, равное >>>" width="" height="" />
. Также =>>>>" width="" height="" />
. Приравняем эти отношения: >>=>>>>" width="" height="" />
. Зная, что изменение скорости есть разность начальной и конечной скоростей, получим, что >\Delta t=m<\overrightarrow
. Каждое из таких произведений называется импульсом тела или количеством движения. Отношение импульса ко времени называется скоростью изменения импульса, и равно равнодействующей всех сил, действующих на тело в данный промежуток времени.
Полным импульсом системы частиц называется векторная сумма импульсов отдельных ее частей в одно и то же время.
Закон изменения импульса [ ]
Скорость изменения импульса системы равна векторной сумме всех внешних сил, действующих на тело в данный промежуток времени.
Отсюда следует, что, если результирующая всех сил, действующих на тело, равна нулю (т.е. они друг-друга компенсируют), то импульс данной системы остается неизменным. (закон сохранения импульса в замкнутой системе).
Система замкнутая, если для всех ее тел взаимодействия с внешними телами отсутствуют или скомпенсированы.
'Абсолютные' ситуации [ ]
Абсолютно упругий удар [ ]
Рассмотрим задачу: два шара разных известных масс двигаются с известными постоянными скоростями и сталкиваются, один шар отлетает с известной скоростью; найти скорость второго шара после столкновения, если трение с поверхностью равно нулю.
Из условия ясно, что система замкнута: на каждый шар действуют только сила тяжести и сила реакции опоры, которые друг друга компенсируют; других сил нет (либо они скомпенсированы друг с другом, что является по сути тем же самым), т.к. ускорение отсутствует. По закону сохранения импульса в замкнутой системе находим импульс системы после столкновения и решаем уравнение с одним неизвестным.
Абсолютно неупругий удар [ ]
Рассмотрим задачу: с известной постоянной скоростью летит пуля известной массы и застревает в тележке с песком известной массы; требуется найти скорость системы после столкновения, если трения с поверхностью у тележки нет; сопротивлением воздуха и силой тяжести пули во время полета пренебречь.
Из условия ясно, что система замкнута: на систему действуют только сила тяжести и сила реакции опоры, которые друг друга компенсируют; других сил нет (либо они скомпенсированы друг с другом, что является по сути тем же самым), т.к. ускорение отсутствует. По закону сохранения импульса в замкнутой системе находим импульс системы после столкновения и решаем уравнение с одним неизвестным. Задача отличается от предыдущей тем, что после столкновения получается не два тела, а одно.
Закон сохранения механической энергии [ ]
Формулировка [ ]
Закон можно описать несколькими предложениями:
, а третье есть обобщение предыдущих (они справедливы только для механических процессах).
Каждое из этих предложений справедливо только в случае, когда тела в замкнутой системе взаимодействуют между собой посредствам только консервативных сил.
Сила называется консервативной, если работа такой силы по замкнутой траектории равна нулю.
Вот еще одно определение: сила консервативная, если ее работа не зависит от формы ее траектории, а зависит только от начальной и конечной точки ее приложения.
Примечание [ ]
Далее рекомендуется рассмотреть следующую задачу: шар подвешен на невесомой нерастяжимой нити длиной L; какую минимальную горизонтально направленную скорость vo надо сообщить шару, чтобы он сделал полный оборот в вертикальной плоскости?
- Для начала воспользуемся ЗСМЭ при переходе шарика из нижнего положения в верхнее./формула/
- Далее заметим, что в верхней точке на шарик будут действовать две силы: сила тяжести (направлена вниз) и сила натяжения нити (также направлена вниз, из условия равна нулю). Эти силы сообщают шарику центростремительное ускорение, направленное вниз — к точке подвеса. Тогда отношение произведения массы на квадрат скорости к длине нити есть сила тяжести. /формула/
- Отсюда квадрат скорости есть произведение ускорения свободного падения на длину нити./формула/
- Проведем подстановку в формулу из первого пункта, и получим: /формула/
- Найдем ответ. Скорость равна корню квадратному из упятеренного произведения ускорения свободного падения на длину нии. /формула/
Гравитационное взаимодействие [ ]
Гравитация - фундаментальное взаимодействие между любыми телами. В классической механике описывается законом всемирного тяготения Ньютона, который утверждает, что сила притяжения между двумя точками массами m1 и m2, расстояние между которыми r будет равна G*m1*m2/r 2 , где G - гравитационная постоянная. Для реальных тел целесообразно пользоваться расстоянием между их центрами масс.
Напряжённость гравитационного поля в точке считается как F/m, где m - масса этой точки, а F - сила гравитационного взаимодействия. Если мы совместим эти формулы, то получится g = G*M/r 2 , где g - ускорение свободного падения для точки или же напряжённость гравитационного поля в точке. g обратно пропорциональна квадрату расстояния до центра масс тела, напряжённость поля которого мы ищем.

1. Ускорения взаимодействующих тел обратно пропорциональны их массам: \( \frac=\frac \) . Преобразовав это равенство, получаем: \( m_1a_1=m_2a_2 \) . В правой и в левой частях равенства стоят одинаковые величины для двух взаимодействующих тел, причем значения ускорений тел не зависят от условий их взаимодействия. Следовательно, можно считать, что произведение массы тела и его ускорения характеризует взаимодействие тел и это произведение равно силе, действующей на тело со стороны другого взаимодействующего с ним тела, т.е.: \( \vec=m\vec \) .
Силой называют физическую величину, характеризующую взаимодействие тел и равную произведению массы тела и его ускорения. Поскольку ускорение векторная величина, а масса скалярная, то сила — векторная величина: \( \vec=m\vec \) .
2. Единица силы, в отличие от единицы массы, является производной единицей СИ. \( [\,F\,]=[\,m\,][\,a\,] \) ; \( [\,F\,] \) = 1кг · 1 м/с 2 . \( [\,F\,] \) = 1 Н (1 ньютон).
Один ньютон — это такая сила, которая телу массой 1 кг сообщает ускорение 1 м/с 2 .
3. Результат действия силы зависит от её модуля, направления и точки приложения. Например, дверную ручку прикрепляют как можно дальше от петель, на которых она висит, поскольку, чем ближе к петлям подействовать силой, тем труднее дверь открыть.
4. Прибором для измерения силы служит динамометр. В соответствии с законом Гука удлинение пружины прямо пропорционально силе упругости, поэтому по удлинению пружины можно судить о приложенной к пружине силе, которая равна силе упругости.
5. Обычно на тело действуют несколько сил. Например, на тело, падающее в воздухе, действуют сила тяжести и сила сопротивления воздуха; на груз, висящий на нити, действуют сила тяжести и сила упругости нити.
При этом действие каждой силы не зависит от действия других, т.е. каждая сила сообщает телу такое ускорение, какое она сообщила бы ему в отсутствие действия других сил. Это утверждение носит название принципа независимости действия сил. Поэтому при расчёте ускорения движения тела все действующие на него силы заменяют одной силой.
Равнодействующей силой называют силу, которая оказывает на тело такое же действие, как и все действующие на него силы вместе.
Равнодействующую силу находят по правилу сложения векторов, она равна геометрической сумме действующих на тело сил.
Если силы, действующие на тело, направлены по одной прямой в одну сторону, то \( \vec=\vec_1+\vec_2 \) , а модуль равнодействующей равен сумме модулей действующих сил \( F=F_1+F_2 \) (рис. 30).

Если силы, действующие на тело, направлены в разные стороны, то \( \vec=\vec_1+\vec_2 \) , а модуль равнодействующей равен разности модулей действующих сил: \( F=F_1-F_2 \) (рис. 31 ).

Если силы направлены под углом друг к другу, то равнодействующая равна диагонали параллелограмма, построенного на действующих на тело силах как на сторонах, или стороне треугольника, начало которой совпадает с началом вектора \( \vec_1 \) , а конец с концом вектора \( \vec_2 \) (рис. 32).
ПРИМЕРЫ ЗАДАНИЙ
Часть 1
1. Ускорение движения парашютиста с раскрытым парашютом определяется его взаимодействием
1) только с Землёй
2) только с Землёй и с воздухом
3) только с Землёй и с парашютом
4) с Землёй, воздухом и парашютом
2. Сила — это мера
1) быстроты движения
2) инертности
3) взаимодействия
4) быстроты изменения скорости
3. Какие из приведённых ниже величин всегда совпадают по направлению?
1) сила и скорость
2) сила и перемещение
3) сила и ускорение
4) ускорение и перемещение
4. На рисунке а) показаны направления силы, действующей на тело, и его скорости. Какой из четырёх векторов, приведённых на рисунке б), указывает направление ускорения, с которым движется это тело?

5. На тело, находящееся на полу движущегося лифта, действуют сила тяжести 90 Н и сила упругости со стороны пола лифта, равная 75 Н. Чему равна равнодействующая этих сил и как она направлена?
1) 45 Н, направлена в ту же сторону, что и сила тяжести
2) 45 Н, направлена в ту же сторону, что и сила упругости
3) 125 Н, направлена в ту же сторону, что и сила тяжести
4) 125 Н, направлена в ту же сторону, что и сила упругости
6. На тело действуют две силы модули которых, — \( F_1 \) = 30 Н и \( F_2 \) = 40 Н, направленные под углом 90° друг к другу. Чему равна равнодействующая этих сил?
1) 70 Н
2) 50 Н
3) 40 Н
4) 10 Н
7. Чему равна равнодействующая сил, действующих на тело (рис.), если \( \vec_1 \) = 4 Н, \( \vec_2 \) = 16 Н, \( \vec_3 \) = 22 Н, \( \vec_4 \) = 6 Н?

1) 48 Н
2) 34 Н
3) 28 Н
4) 20 Н
8. Чему равна сила, под действием которой тело массой 8 кг получает ускорение 4 м/с 2 ?
1) 32 Н
2) 8 Н
3) 2 Н
4) 0,5 Н
9. Результат действия силы зависит от
А. Её направления
Б. Точки приложения
1) только А
2) только Б
3) и А, и Б
4) ни А, ни Б
10. На наклонной плоскости покоится брусок, на который действуют сила тяжести \( \vec \) , сила реакции опоры \( \vec \) и сила трения покоя \( \vec_ \) . Чему равна равнодействующая этих сил?

11. Установите соответствие между физическими величинами в левом столбце и их единицами в правом столбце. В таблице под номером физической величины левого
столбца запишите соответствующий номер выбранной вами единицы величины из правого столбца.
ФИЗИЧЕСКАЯ ВЕЛИЧИНА
A) масса
Б)сила
B)ускорение
ЕДИНИЦА ВЕЛИЧИНЫ
1) Ньютон (Н)
2) метр в секунду в квадрате (м/с 2 )
3) килограмм (кг)
12. Из приведённых высказываний выберите два верных и запишите их номера.
1) Из двух тел разной массы при действии на них одинаковой силы большее ускорение приобретет тело большей массы.
2) Сила равна произведению массы тела и его ускорения.
3) Направление движения тела всегда совпадает с направлением силы.
4) Сила — причина ускорения тела.
Часть 2
13. На автомобиль массой 1 т действуют сила тяги 1700 Н и сила трения 200 Н. С каким ускорением движется автомобиль?
Результирующая сила – это векторная сумма всех сил, действующих на данное тело.
Если тело некоторой массы m двигалось под действием приложенных сил, и его скорость изменилась от до то силы совершили определенную работу A.
Работа всех приложенных сил равна работе равнодействующей силы
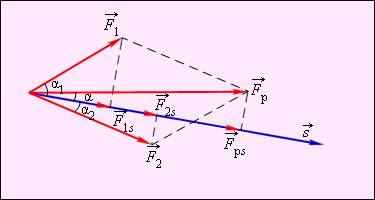

Работа равнодействующей силы.
A = F1s cos α1 + F2s cos α2 = F1ss + F2ss = Fрss = Fрs cos α
Между изменением скорости тела и работой, совершенной приложенными к телу силами, существует связь. Эту связь проще всего установить, рассматривая движение тела вдоль прямой линии под действием постоянной силы В этом случае векторы силы перемещения скорости и ускорения направлены вдоль одной прямой, и тело совершает прямолинейное равноускоренное движение. Направив координатную ось вдоль прямой движения, можно рассматривать F, s, υ и a как алгебраические величины (положительные или отрицательные в зависимости от направления соответствующего вектора). Тогда работу силы можно записать как A = Fs. При равноускоренном движении перемещение s выражается формулой

Отсюда следует, что

Это выражение показывает, что работа, совершенная силой (или равнодействующей всех сил), связана с изменением квадрата скорости (а не самой скорости).
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела:

Работа приложенной к телу равнодействующей силы равна изменению его кинетической энергии.

Это утверждение называют теоремой о кинетической энергии. Теорема о кинетической энергии справедлива и в общем случае, когда тело движется под действием изменяющейся силы, направление которой не совпадает с направлением перемещения.

Кинетическая энергия – это энергия движения. Кинетическая энергия тела массой m, движущегося со скоростью равна работе, которую должна совершить сила, приложенная к покоящемуся телу, чтобы сообщить ему эту скорость:

Закон сохранения энергии при абсолютно упругом и абсолютно неупругом ударе.
Закон сохранения механической энергии
Если тела, составляющие замкнутую механическую систему, взаимодействуют между собой только посредством сил тяготения и упругости, то работа этих сил равна изменению потенциальной энергии тел, взятому с противоположным знаком:
По теореме о кинетической энергии эта работа равна изменению кинетической энергии:

Или Ek1 + Ep1 = Ek2 + Ep2.
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой посредством сил тяготения и сил упругости, остается неизменной.
Это утверждение выражает закон сохранения энергии в механических процессах. Он является следствием законов Ньютона. Сумму E = Ek + Ep называют полной механической энергией. Закон сохранения механической энергии выполняется только тогда, когда тела в замкнутой системе взаимодействуют между собой консервативными силами, то есть силами, для которых можно ввести понятие потенциальной энергии.
Ударом (или столкновением) принято называть кратковременное взаимодействие тел, в результате которого их скорости испытывают значительные изменения. Во время столкновения тел между ними действуют кратковременные ударные силы, величина которых, как правило, неизвестна. Поэтому нельзя рассматривать ударное взаимодействие непосредственно с помощью законов Ньютона. Применение законов сохранения энергии и импульса во многих случаях позволяет исключить из рассмотрения сам процесс столкновения и получить связь между скоростями тел до и после столкновения, минуя все промежуточные значения этих величин.
В механике часто используются две модели ударного взаимодействия – абсолютно упругий и абсолютно неупругий удары.
Абсолютно неупругим ударом называют такое ударное взаимодействие, при котором тела соединяются (слипаются) друг с другом и движутся дальше как одно тело.
При абсолютно неупругом ударе механическая энергия не сохраняется. Она частично или полностью переходит во внутреннюю энергию тел (нагревание).
Абсолютно упругим ударом называется столкновение, при котором сохраняется механическая энергия системы тел.
Во многих случаях столкновения атомов, молекул и элементарных частиц подчиняются законам абсолютно упругого удара.
При абсолютно упругом ударе наряду с законом сохранения импульса выполняется закон сохранения механической энергии.
Простым примером абсолютно упругого столкновения может быть центральный удар двух бильярдных шаров, один из которых до столкновения находился в состоянии покоя.
Центральным ударом шаров называют соударение, при котором скорости шаров до и после удара направлены по линии центров.

В общем случае массы m1 и m2 соударяющихся шаров могут быть неодинаковыми. По закону сохранения механической энергии

Здесь υ1 – скорость первого шара до столкновения, скорость второго шара υ2 = 0, u1 и u2 – скорости шаров после столкновения.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.004)
Основу динамики материальной точки составляют три закона Ньютона.
К выводу о существовании явления инерции впервые пришел Галилей, а затем Ньютон. Этот вывод формулируется в виде первого закона Ньютона (закона инерции): существуют такие системы отсчета(инерциальные), относительно которых тело (материальная точка) при отсутствии на нею внешних воздействий (или при их взаимной компенсации) сохраняет состояние покоя или равномерного прямолинейного движения.
ai=Fi/m.Результирующее ускорение точки, находящейся под действием нескольких сил, равно геометрической сумме отдельных ускорений , сообщаемых каждой силой в отдельности. Величина и направление ускорения таковы, как если бы на точку действовала одна сила, равная векторной сумме приложенных сил:
В этих формулах m - масса тела. Вообще, масса тела есть мера его инерции. Величина массы данного тела определяется как отношение силы к ускорению, которая она сообщает телу.
Третий закон связывает между собой силы, с которыми тела действуют друг на друга, а именно: силы, с которыми тела действуют друг на друга, всегда равны по величине и противоположны по направлению.
При этом необходимо обратить внимание на следующее: Силы всегда возникают парами. Если есть одна, то есть и другая, ей противоположная.
Вес тела. Невесомость. Перегрузка [ ]
Определения [ ]
Весом тела называтся сила, действующая на его опору, возникающая в поле силы тяжести.
Невесомостью называется состояние отсутствия у тела веса (далее этот пункт будент пояснен).
Вес тела и невесомость [ ]
Рассмотрим ситуацию, когда тело неподвижно лежит на жесткой опоре, параллельной поверхности Земли. На него действует сила тяжести и сила нормальной реакции опоры (сила упругости, с которой опора действует на тело, и т.к. она жесткая эта сила равна силе тяжести по модулю и противоположна по направлению). Тогда по третьему закону Ньютона, если опора действует на тело, то и тело в свою очередь действует на опору с такой же по модулю силой, но обратной по направлению. Эта сила и называется весом тела. Ее не следует путать с силой тяжести, т.к. эти силы приложены к разным телам.
.
Тогда ускорение свободного падения и собственное ускорение лифта будут положительны.
Будем рассматривать случаи:
- Когда a g, вес тела в ускоренно движущемся лифте больше силы тяжести - тело прижимается к потолку лифта.
- Когда a=g, вес тела обращается в ноль. Тело свободно падает на Землю вместе с кабиной. Такое состояние называется невесомостью.
Законы Кеплера [ ]
Вступление [ ]
С точки зрения земного наблюдателя планеты движутся по весьма сложным траекториям. Первая попытка создания модели Вселенной была предпринята Птолемеем. В центре мироздания Птолемей поместил Землю, вокруг которой по большим и малым кругам, как в хороводе, двигались планеты и звезды.
Геоцентрическая система Птолемея продержалась более 14 столетий и только в середине XVI века была заменена гелиоцентрической системой Коперника. В системе Коперника траектории планет оказались более простыми. Немецкий астроном И. Кеплер в начале XVII века на основе системы Коперника сформулировал три эмпирических закона движения планет Солнечной системы, названных законами Кеплера.
Первый закон Кеплера [ ]
Все планеты движутся по эллиптическим орбитам, в одном из фокусов которых находится Солнце.
Ближайшая к Солнцу точка траектории называется перигелием, точка наиболее удаленная от Солнца – афелием. Расстояние между афелием и перигелием – большая ось эллипса.
Почти все планеты Солнечной системы (кроме Плутона) движутся по орбитам, близким к круговым.
Второй закон Кеплера [ ]
Радиус-вектор планеты описывает в равные промежутки времени равные площади.
Второй закон Кеплера эквивалентен закону сохранения момента импульса.
Третий закон Кеплера [ ]
Квадраты периодов обращения планет относятся как кубы больших полуосей их орбит.
Вывод Ньютона. [ ]
При движении тела по эллипсу (приблизим его к окружности) возникает центростремительное ускорение.
Рассмотрим отношение центоростемительных ускорений двух планет, и получим, что оно равно отношению квадратов радиусов их орбит.
Рассмотрим отношение центоростемительных ускорений двух планет:
Законы сохранения. [ ]
Закон сохранения импульса [ ]
Вступление [ ]
В результате действия силы на тело (материальную точку) возникает ненулевое ускорение, равное >>>" width="" height="" />
. Также =>>>>" width="" height="" />
. Приравняем эти отношения: >>=>>>>" width="" height="" />
. Зная, что изменение скорости есть разность начальной и конечной скоростей, получим, что >\Delta t=m<\overrightarrow
. Каждое из таких произведений называется импульсом тела или количеством движения. Отношение импульса ко времени называется скоростью изменения импульса, и равно равнодействующей всех сил, действующих на тело в данный промежуток времени.
Полным импульсом системы частиц называется векторная сумма импульсов отдельных ее частей в одно и то же время.
Закон изменения импульса [ ]
Скорость изменения импульса системы равна векторной сумме всех внешних сил, действующих на тело в данный промежуток времени.
Отсюда следует, что, если результирующая всех сил, действующих на тело, равна нулю (т.е. они друг-друга компенсируют), то импульс данной системы остается неизменным. (закон сохранения импульса в замкнутой системе).
Система замкнутая, если для всех ее тел взаимодействия с внешними телами отсутствуют или скомпенсированы.
'Абсолютные' ситуации [ ]
Абсолютно упругий удар [ ]
Рассмотрим задачу: два шара разных известных масс двигаются с известными постоянными скоростями и сталкиваются, один шар отлетает с известной скоростью; найти скорость второго шара после столкновения, если трение с поверхностью равно нулю.
Из условия ясно, что система замкнута: на каждый шар действуют только сила тяжести и сила реакции опоры, которые друг друга компенсируют; других сил нет (либо они скомпенсированы друг с другом, что является по сути тем же самым), т.к. ускорение отсутствует. По закону сохранения импульса в замкнутой системе находим импульс системы после столкновения и решаем уравнение с одним неизвестным.
Абсолютно неупругий удар [ ]
Рассмотрим задачу: с известной постоянной скоростью летит пуля известной массы и застревает в тележке с песком известной массы; требуется найти скорость системы после столкновения, если трения с поверхностью у тележки нет; сопротивлением воздуха и силой тяжести пули во время полета пренебречь.
Из условия ясно, что система замкнута: на систему действуют только сила тяжести и сила реакции опоры, которые друг друга компенсируют; других сил нет (либо они скомпенсированы друг с другом, что является по сути тем же самым), т.к. ускорение отсутствует. По закону сохранения импульса в замкнутой системе находим импульс системы после столкновения и решаем уравнение с одним неизвестным. Задача отличается от предыдущей тем, что после столкновения получается не два тела, а одно.
Закон сохранения механической энергии [ ]
Формулировка [ ]
Закон можно описать несколькими предложениями:
, а третье есть обобщение предыдущих (они справедливы только для механических процессах).
Каждое из этих предложений справедливо только в случае, когда тела в замкнутой системе взаимодействуют между собой посредствам только консервативных сил.
Сила называется консервативной, если работа такой силы по замкнутой траектории равна нулю.
Вот еще одно определение: сила консервативная, если ее работа не зависит от формы ее траектории, а зависит только от начальной и конечной точки ее приложения.
Примечание [ ]
Далее рекомендуется рассмотреть следующую задачу: шар подвешен на невесомой нерастяжимой нити длиной L; какую минимальную горизонтально направленную скорость vo надо сообщить шару, чтобы он сделал полный оборот в вертикальной плоскости?
- Для начала воспользуемся ЗСМЭ при переходе шарика из нижнего положения в верхнее./формула/
- Далее заметим, что в верхней точке на шарик будут действовать две силы: сила тяжести (направлена вниз) и сила натяжения нити (также направлена вниз, из условия равна нулю). Эти силы сообщают шарику центростремительное ускорение, направленное вниз — к точке подвеса. Тогда отношение произведения массы на квадрат скорости к длине нити есть сила тяжести. /формула/
- Отсюда квадрат скорости есть произведение ускорения свободного падения на длину нити./формула/
- Проведем подстановку в формулу из первого пункта, и получим: /формула/
- Найдем ответ. Скорость равна корню квадратному из упятеренного произведения ускорения свободного падения на длину нии. /формула/
Гравитационное взаимодействие [ ]
Гравитация - фундаментальное взаимодействие между любыми телами. В классической механике описывается законом всемирного тяготения Ньютона, который утверждает, что сила притяжения между двумя точками массами m1 и m2, расстояние между которыми r будет равна G*m1*m2/r 2 , где G - гравитационная постоянная. Для реальных тел целесообразно пользоваться расстоянием между их центрами масс.
Напряжённость гравитационного поля в точке считается как F/m, где m - масса этой точки, а F - сила гравитационного взаимодействия. Если мы совместим эти формулы, то получится g = G*M/r 2 , где g - ускорение свободного падения для точки или же напряжённость гравитационного поля в точке. g обратно пропорциональна квадрату расстояния до центра масс тела, напряжённость поля которого мы ищем.
обучающая: Познакомить с понятием “сила”, “равнодействующая сил”, признаками действия силы. Сформировать понятие силы как количественной характеристики действия одного тела на другое.
развивающая: Способствовать развитию логического мышления. Продолжить работу над развитием интеллектуальных умений и навыков: выделение главного, анализ, умение делать выводы.
воспитывающая: формировать интерес учащихся к изучению физики.
Оборудование:
- мультимедийный проектор, ноутбук, экран, колонки
- машинка,
- ракетка с валанчиком,
- пружина,
- губка.
Раздаточный материал:
- Карточки с вопросами по теме для обобщающего урока.
- Карточки с вопросами и заданиями для закрепления материала этого урока.
- Ход урока:
I. Актуализация знаний.
В жизни мы постоянно встречаемся со случаями действия тел друг на друга.
Рассмотрим примеры таких действий:
1. Машинка съезжает с горки и попадает в песок (изменение скорости движения)
2. Ракетка и валанчик (изменение направления движения тела)
3. Растягивание пружины (изменение формы тела – движение частей пружины…)
4. Сжатие губки (изменение размеров тела, движение частей губки…)
Во всех случаях мы видели, что в результате воздействия на тело другого тела изменяется скорость всего тела или отдельных его частей.
Часто не указывают, какое именно тело действует на другое тело, а говорят: “На тело действует сила.”
Т.О. Именно сила является причиной изменения скорости тела.
И сегодня на уроки мы начнем изучать физическую величину – силу.
II. Изучение нового материала.
Тема урока: “Сила”.
![]()
![]()
![]()
Известны четыре признака действия на тело силы:
- изменение скорости тела,
- изменение направления движения тела,
- изменение формы тела,
- изменение размеров тела.
Если есть хотя бы один из этих признаков, то говорят: “На тело действует некоторая сила”.
Сила обозначается буквой F со стрелочкой наверху. F
Сила, как и скорость, является векторной величиной. Она характеризуется не только числовым значением, но и направлением.
Единица измерения силы – Ньютон, обозначается [H] [H]- Ньютон
В честь английского ученого Исаака Ньютона
На чертежах силу изображают в виде прямой стрелки, называемой вектором этой силы. Длина стрелки символизирует числовое значение силы, а направление стрелки указывает направление действия силы.
![]()
Начало отрезка – точка А - есть точка приложения силы. Длина отрезка условно обозначает в определенном масштабе модуль силы.
Изобразите силу 60Н действующую на санки . (После оглашения задания открыть подсказку для решения таких задач)
Алгоритм решения задания.
![]()
![]()
Изобразите силу, с которой парашют поддерживает парашютиста, если она равна 600Н
![]()
![]()
![]()
![]()
![]()
( Любое тело для простоты можно изображать овалом, кругом, прямоугольником.)
2. Введение понятия “ Равнодействующая сил”.
На практике часто, на одно и тоже тело действуют несколько сил. Иногда бывает необходимость заменить действие нескольких сил, приложенных к телу, одной силой.
![]()
Силу, заменяющую действие нескольких других сил, называют равнодействующей силой . Она производит над телом такое же действие, как и заменяемые ею силы. Равнодействующая сила.
Если силы, приложенные к телу, направлены по одной прямой в одну и ту же сторону, то результирующая этих сил направлена в ту же сторону, а ее модуль равен сумме модулей этих сил ( R = F1+F2)
Если силы, приложенные к телу, направлены в противоположные стороны, то результирующая сил направлена в сторону большей по модулю силы, а ее модуль равен разности модулей этих сил ( R = |F1-F2| )
Если две силы, приложенные к одному и тому же телу, направлены противоположно и имеют одинаковую величину, то их называют уравновешенными силами. Равнодействующая таких сил равна нулю. ( R = 0)
- Два мальчика тянут сани, действуя на них силами 20Н и 10Н. Изобразите на чертеже эти силы.
Силы действуют в одну сторону. Силы действуют в противоположные стороны.
![]()
Бывают случаи, когда действующие на тело силы направлены в разные стороны, а результирующая сила все равно равна нулю. Если результирующая сил равна нулю, то тело скорость не изменяет!
Читайте также:












