
Способы индикации на экране рлс вспомогательной информации при решении задач расхождения судов
Обновлено: 19.05.2024
Необходимость специального рассмотрения решающих процедур обусловлена тем, что в значительном большинстве возникающих на практике задач классические методы теории статистических решений мало пригодны из-за ряда особенностей и ограничений, характерных для распознавания радиолокационных целей. Основными из них являются:
жесткие ограничения времени расчетов, объема памяти запоминающих устройств, пропускной способности каналов передачи информации;
высокий уровень априорной неопределенности. Так, далеко не всегда можно считать известными вероятности классов стоимости принятия решений, законы распределения вероятностей . Иногда отсутствует возможность набора обучающей статистики о распознаваемых объектах, поэтому описание их характеристик носит качественный характер;
воздействие разного рода помех, большое разнообразие характеристик целей, объединенных в один и тот же класс. Параметры РЛС (например, мощность и несущая частота зондирующих сигналов) не всегда удовлетворяют требованиям высокой стабильности, ракурсы целей относительно РЛС могут изменяться в широких пределах и в большинстве случаев неизвестны наблюдателю. Все эти факторы могут приводить к существенной нестационарности и во многих случаях исключают возможность их аналитической аппроксимации;
распознавание объектов зачастую будет производиться системой РЛС, объединенных общим пунктом обработки информации. Частные решения каждой РЛС о классе наблюдаемой цели будут поступать на такой пункт для принятия общего решения;
возможность одновременного наблюдения и распознавания нескольких объектов, составляющих группу. В такой ситуации распознавание каждой цели по одиночке не является оптимальным.
В зависимости от выполнимости тех или иных перечисленных факторов могут быть построены решающие схемы, оптимальные или близкие к оптимальным в конкретных условиях функционирования систем РРЦ.
Будем считать, что информация о наблюдаемой цели поступает на вход устройства распознавания, включающего Т измерительных каналов Измерительным каналом в общем случае может быть как отдельный объединенный вместе с другими автоматами и пунктом обработки информации в единую систему, так и схема, оценивающая значение конкретного признака распознавания, например, амплитуды эхосигнала цели.
Каждый анализирует значение одного признака или множества признаков цели. Объединение подмножеств измеренных всеми составляет признак X цели;
Результатом обработки признака является величина (множество) . В простейшем случае хотя возможны и более сложные преобразования, например принятие частных решений
или расчет вероятностей гипотез
Признаки могут измеряться разными одновременно или последовательно. Последнему предположению с математической; точки зрения эквивалентно многократное измерение одного и того же признака X в моменты .
Множество результатов измерений всех подается: на устройство принятия общих решений. По отношению к нему множество У служит вторичным признаком цели. Общее решение принимается после анализа множества У и состоит в отнесении цели к одному из классов заданного алфавита или расчете М апостериорных вероятностей гипотез
где — условный множества Y.
Если не оговорено противное, будем считать, что распознавание каждой цели (при наличии необходимой априорной информации) производится по правилу идеального наблюдателя. Полученные результаты нетрудно распространить на другие критерии эффективности РРЦ.
Наивысшую достоверность распознавания можно обеспечить при использовании условных или достаточных статистик признаков цели. Для этого необходимо оценивать значения или достаточных статистик путем анализа множества Так, если возможны взаимно однозначные преобразования то указанную задачу можно решить известными способами нахождения функции случайной величины [32, 66].
В противном случае неизбежна потеря информации о цели и «основная задача разработчика систем РРЦ сводится к минимизации таких потерь. Потери могут соответствовать и преобразованию вида затрудняющему учет статистических связей между элементами множества X. Здесь вероятности гипотез, рассчитанные в
Если избежать потерь информации в невозможно, то общие решения лучше всего принимать путем расчета и анализа вторичных признаков
Когда статистическими связями между признаками можно пренебречь (например, после выполнения декоррелирующего преобразования), функцию принято определять как произведение условных . В § 6.2 показано, что непосредственное использование этой формулы иногда приводит к некорректным результатам.
Из всех способов преобразования особого внимания заслуживает преобразование вида формирующее частное решение . Такие решения широко используют в устройствах бинарного обнаружения сигналов и технической диагностики.
В задачах РРЦ частные решения принимают, например, объединении в единую систему нескольких однотипных РЛС. Если распознавание производит один выдающий решения через некоторый промежуток времени, отведенный для РРЦ, то при увеличении времени контакта с целью может появиться необходимость принятия общего решения по совокупности частных решений, сформированных ранее.
Если алфавиты классов, используемых разными не совпадают, задача усложняется. Примером может служить использование доплеровской РЛС, распознающей три класса целей по скорости: — неподвижная; — малоскороствая; совместно со второй РЛС, оценивающей размеры целей: — малые; — средние; Общее решение должно быть принято в пользу одного из классов главного алфавита: — дирижабли; вертолеты; — транспортные самолеты; — истребители; — местные предметы. Очевидно, что решения принятые в соответствии с алфавитами заданными каждой несут информацию, полезную для разделения целей в соответствии с алфавитом общих решений
Величины как , будем называть частными решениями измерительных каналов. Разница между ними состоит только в том, что бинарная переменная фиксирует факт отнесения цели в и к одному из вспомогательных классов из М классов основного алфавита:
Иногда вместо обозначений и будем использовать отождествляя эту переменную с номером класса (или q), к которому цель отнес 1-й канал.
В зависимости от того, какие преобразования производятся в измерительных каналах, различают оптимальные алгоритмы, основанные на использовании или соответствующих достаточных статистик; алгоритмы голосования частных решений; непараметрические процедуры. Рассмотрим их последовательно.
Оптимальные процедуры. Решающая схема, обладающая наибольшей мощностью, имеет вид
К сожалению, в таком виде она практически неприменима при: решении большинства задач РРЦ. Главная причина — это трудности в задании . Особенно сложна аналитическая аппроксимация многомерных функций которые, как правило, многомодальны, их параметры могут существенно изменяться, при вариации условий наблюдения целей, а составляющие иногда имеют высокую степень статистических связей.
Зачастую отсутствует возможность априорного анализа сигналов, характеризующих объекты локации, и их описания оказываются весьма приблизительными. Наконец, отдельные признаки целей, например поведенческие, нельзя считать случайными величинами в строго математическом смысле. Поэтому их описание с помощью функций оказывается не совсем корректным.
Правила голосования. Известен [28, 57, 61] ряд решающих схем, позволяющих принимать общие решения путем анализа функций Рассмотрим основные из них.
Допустим независимость решений При этом, как будет показано, оптимальное общее решение должно приниматься по правилу взвешенного голосования
где — вероятность того, что в ИК объект класса будет отнесен к классу .
Упрощенным вариантом рассмотренного правила является алгоритм простого голосования, когда все коэффициенты считаются нулевыми, а — единичными:
В общем случае коэффициенты могут зависеть от текущих значений признаков Примером может служить алгоритм оптимального голосования [28]
Общие решения, принимаемые в соответствии с этим правилом, совпадают с решениями, полученными по правилу идеального наблюдателя, примененному к множеству признаков X, поступающих на входы измерительных каналов, при независимости подмножеств
Областью компетентности канала называется множество значений признаков, при котором этот канал обеспечивает наивысшую достоверность частных решений среди всех Т измерительных каналов.
Очевидно, что отказ от анализа решений остальных каналов связан с потерей информации. Если положить весовые коэффициенты всех каналов отличными от нуля и вычислить их с учетом вероятностей ошибочных и правильных решений каждого для всех Т областей компетентности, то этот недостаток рассмотренного алгоритма может быть устранен.
Еще один способ повысить эффективность голосования коллектива решающих правил — это учет не только значений признаков X, но и условий наблюдения у. Действительно, допустим, что одни и те же эхосигналы радиолокационной цели поступают на два устройства принятия решений. Первое из них распознает объекты на основании расчета функций , а второе вычисляет функции т. е. способно учитывать условия наблюдения объекта. Если параметр у не оценивается, то решения обоих устройств идентичны. Если информация об условиях наблюдения задана, то при всех значениях признака X решения второго устройства будут более достоверными.
Второй эмпирический алгоритм называется правилом максимальной уверенности. Он напоминает алгоритм голосования коллектива решающих правил и отличается предположением о том, что множества признаков обрабатываемых в разных не пересекаются. При этом общее решение отождествляется с частным решением того канала, которому соответствует максимальное из всех значений вероятностей гипотез
Расстояния можно оценивать, например, методом средних квадратов: где .
Очевидно, что один из недостатков такого подхода — одинаковый вклад в расстояние каждого из Т вторичных признаков хотя они обычно имеют разную информативность.
Методы, основанные на локальных оценках плотностей распределения вероятностей признаков, предполагают запоминание обучающей выборки и распознавание каждой новой цели с учетом результатов классификации объектов, участвовавших в обучении Такой подход вряд ли можно рекомендовать для большинства задач РРЦ ввиду его сложности и трудностей априорного обучения по реальным объектам.
Многоуровневые решающие схемы можно применять для отдельных простых задач РРЦ. Они предполагают разбиение множества классов на ряд подмножеств
Признаки согласно анализируются последовательно. В зависимости от того, в какую из областей попало значение t-го признака, распознаваемая цель считается относящейся к алфавиту который получен из алфавита путем исключения одного или нескольких классов После анализа последнего признака каждый из М возможных алфавитов включает только по одному классу целей . В зависимости от величины объект относится к одному из них. Математически описывается выражением
и цель относится к тому классу, который не был исключен ни. на одном из этапов анализа, т. е. ни одним ИК.
Многоуровневые алгоритмы привлекательны своей простотой, но обладают и рядом недостатков. Основной из них состоит в том, что ошибка, допущенная вследствие анализа одного признака, непоправима даже тогда, когда все остальные признаки прямо указывают на исключенный класс. Это ограничивает множество признаков, которыми оперируют многоуровневые РА, небольшим числом наиболее информативных характеристик радиолокационной цели. Очевидно, что такой прием снижает общий объем анализируемых сведений об объекте распознавания, а вместе с тем и вероятность его правильной классификации.
Кроме того, следует отметить сложность принятия окончательных решений при многократном повторении процесса распознавания, а также трудность учета информации о важности объектов разных классов, априорных вероятностей их наблюдения.
Проведенный анализ решающих схем позволяет рекомендовать для практического решения задач РРЦ компромиссный подход, исключающий необходимость точного знания законов но сохраняющий ряд преимуществ байесовских процедур. Такой подход может быть реализован с, помощью процедуры обобщенного голосования, рассматриваемой далее. При этом в зависимости от уровня априорной неопределенности решающее правило будет приближаться оптимальной параметрической (при известных ) или непараметрической (при полностью неизвестных процедуре.
Рассмотрим теперь коротко процесс обработки признаков целей в . Особого внимания заслуживают декоррелирующие преобразования вида где — специально подобранные постоянные коэффициенты, позволяющие в некоторых случаях получить некоррелированную систему вторичных признаков . При этом облегчается расчет
Обратим внимание на то, что преобразование проводится индивидуально для каждого класса При иногда возможна одновременная декорреляция признаков целей обоих классов
Еще один подход к построению вторичных признаков определяется стремлением повысить их статистическую устойчивость (см. § 4.5, 9.4). При этом удается достаточно точно оценить, в отличие от параметры которых могут неопределенным образом изменяться в широких пределах.
В дальнейшем будем считать, что в каждом производится квантование множества признаков на некоторое число областей Значение может изменяться от двух (при бинарном квантовании) до когда множество воспроизводит входное воздействие без потери информации.
Положим сначала, что в каждом производится квантование множества значений на М областей по числу классов распознаваемых объектов. Для реализации правила взвешенного голосования должны быть заданы вероятности попадания признаков целей разных классов в каждую из таких областей принятия частных решений.
Как будет показано, выделение областей решений не должно быть произвольным. От того, как оно произведено, существенно зависит эффективность общих решений. При этом области обеспечивающие оптимальность частных решений каждого канала при его автономной работе, как правило, не будут наилучшими при работе этого канала в составе системы ИК.
С другой стороны, если разные РЛС используют отличающиеся алфавиты классов, то совместная обработка их частных решений с помощью рассмотренных правил голосования невозможна. Предположение о совпадении алфавитов общих и частных решений оказывается излишним и в тех случаях, когда хотя бы часть ИК входит в состав одного и того же устройства распознавания. Отказ от него позволяет заметно повысить эффективность распознавания, а иногда и упростить решающие процедуры.
Для доказательства сделанного утверждения рассмотрим следующий пример. Пусть распознаются объекты двух равновероятных классов по нескольким отсчетам равномерно распределенных признаков (рис. 6.1). Порог принятия решений по одному отсчету признака положим равным единице. Тогда вероятности ошибок каждого из каналов (т. е. по каждому отсчету) составят
Произведем два независимых отсчета признаков и проанализируем возможные варианты соответствующих комбинаций
Таблица 6.1 (см. скан)
решений (табл. 6.1). При одинаковых вероятностях комбинаций решений объекты в одном случае будем относить к классу во втором случае — к классу . Средняя вероятность ошибки общих решений совпала со средней вероятностью ошибки по одному отсчету.
Обратим внимание на то, что ошибочные решения могут приниматься только при попадании отсчетов признаков в область [0,5; 1,5]. Рассмотрим, к чему приведет рассмотрение нового алфавита частных решений (табл. 6.2 и рис. 6.1). Составим возможные комбинации новых частных решений и рассчитаем их условные вероятности где — номера вспомогательных классов (табл. 6.3). При равенстве вероятностей общие решения будем распределять поровну между классами.
Как следует из анализа табл. 6.3, увеличение размерности алфавита первичных решений с двух до трех обеспечило снижение вероятностей ошибок от т. е. примерно в 1,33 раза. Интересно отметить, что более сложный алгоритм идеального наблюдателя в условиях рассмотренного примера приводит к той же вероятности ошибки что и легко реализуемое правило голосования.
Таблица 6.2 (см. скан)
Таблица 6.3 (см. скан)
Важнейший элемент процесса обработки радиолокационной информации при прокладке и глазомерном анализе - прогнозирование изменения направления линии относительного движения (ЛОД) и относительной скорости сближения (V0) при маневрах судов.
Действительно, прежде чем начать маневрировать, судоводитель должен хорошо представлять, как будет изменяться ситуация расхождения с целями в результате его собственных действий. Существует несколько вариантов определения закономерностей относительного движения (ЗОД), на основании понимания которых судоводитель может прогнозировать ситуацию расхождения.
Наиболее удачным представляется описание ЗОД, применяемое на тренажерах США. Приведем определение ЗОД при изменениях курса: "При повороте вправо направление ЛОД судов-целей, сближающихся с нами и находящихся впереди траверза, изменится по часовой стрелке, позади траверза - против часовой стрелки (рис. 1); при левом повороте - зеркальное отображение закономерности".
Такой вариант описания ЗОД в течение длительного времени применяется и на некоторых радиолокационных тренажерах Минрыбхоза. Он более универсален по сравнению с другими: охватывается большая часть горизонта вокруг нашего судна, за исключением траверзных секторов; рассмотрены случаи поворота в сторону и отворота от судна-цели.
Вместе с тем в ряде секторов описанная закономерность может не выполняться. Это связано с тем, что при повороте местоположение цели относительно траверзной линии нашего судна меняется, в результате и закономерность для нее может измениться на обратную. Например, при поворотах вправо на 0° - 90° такими являются сектора 1 и 2, при повороте влево - сектора 3 и 4 (см. рис. 1). Описание ЗОД будет универсальным в том случае, если оно будет охватывать ЛОДы всех направлений во всех секторах относительно нашего судна. Samuel М. Van Wyek и Max. Н. Carpenter * для определения направления ЛОД судна-сателлита, находящегося в любом секторе, в том числе и траверзном, при поворотах нашего судна предлагают способ "половинного угла" (рис. 2). Если планируется поворот на угол α, то механический визир направления (а вместе с ним и круг с системой параллельных и перпендикулярной линий) поворачивается от курсовой черты в сторону поворота на половину угла (α/2). Линия, перпендикулярная визиру Направления, покажет сторону ЛОД для судна-сателлита (в противоположную повороту сторону). Ее можно назвать "направляющей" (см. рис. 2, пунктирная линия).
* (The Raelar book. Cornell Maritime Press, 1984.)
Итак, прогноз для сателлитов (когда ЛОД отсутствует) возможен в любом секторе. Рассмотрим, каким образом способ "половинного угла" можно распространить на общий случай, когда судно-цель находится в любом секторе и имеет ЛОД любого направления. Для этого обратимся к способу "линий стягивания" (см. "РХ", 1990, № 2, с. 70).
Рассмотрим ситуацию, когда цели расположены по всему горизонту и сближаются с нашим судном вплотную (пеленг заметно не изменяется) (рис. 3). Можно сказать, что суда-цели в этом случае стягиваются к началу развертки.
Допустим, что планируется поворот вправо на 40°. На рис. 3 показано соответствующее этом повороту положение "направляющей линии". Можно сказать, что направление ЛОД целей после нашего поворота изменится таким образом, что эхо-сигналы будут как бы стягиваться уже не в начало развертки, а к "направляющей линии" (в этом случае ее можно называть еще и "линией стягивания").
Таким образом, расширив метод "половинного угла", можно получить описание ЗОД, близкое к универсальному. Действительно, он охватывает все сектора и направления ЛОД. Чем ближе к направляющей линии находятся суда-цели, тем менее точен прогноз (см. рис. 3, суда А и В), хотя сторону отворота ЛОД можно определить в любом случае. Направление ЛОД судна С не изменится, а относительная скорость сближения при повороте в сторону эхо-сигнала возрастет.
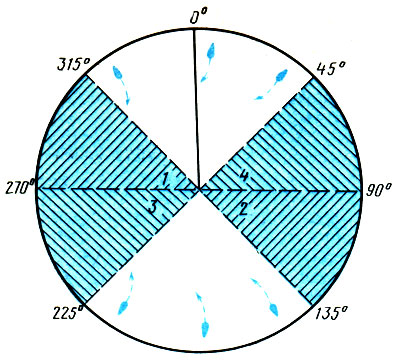
Рис. 1
Может возникнуть вопрос, насколько ЛОД целей изменит свое направление при повороте на 40°. Для ответа можно воспользоваться следующим определением: чем больше относительная скорость сближения, тем ближе от начала развертки ожидаемая ЛОД (рис. 4, пунктирная линия) пересекает "направляющую линию" и соответственно тем меньше идет угол разворота ЛОД (судно А). Чем меньше относительная скорость сближения, тем дальше от начала развертки след послесвечения (ОЛОД) пересекает "направляющую линию" и соответственно тем больше угол между ЛОД и ОЛОД (судно В). У судна-сателлита точка пересечения удалена в бесконечность, и появляющаяся при нашем маневре ЛОД всегда параллельна "направляющей линии" (судно С). В случае равенства относительной и нашей скорости ОЛОД пересекает направляющую линию на дистанции, равной дистанции до цели в момент нашего изменения курса (судно Д). Последнее утверждение справедливо только при изменениях курса на 60°, при других значениях угла поворота оно может использоваться как ориентировочное.
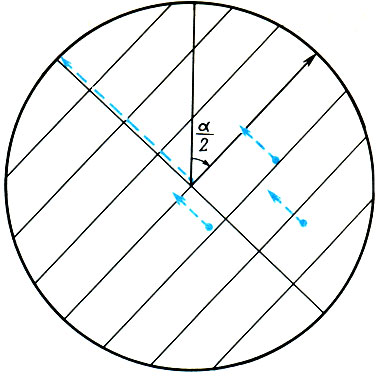
Рис. 2
Описанный подход можно использовать и для целей, пеленг которых изменяется заметно. Изменение направления ЛОД у таких целей, например, потенциально опасной цели Е (см. рис. 4), будет таким же, как у цели А, ЛОД которой проходит через начало развертки, а также цели Е и С (см. рис. 3).
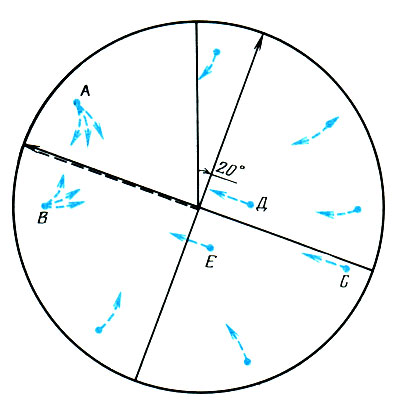
Рис. 3
Таким образом, предполагаемый способ позволяет определить не только качественный критерий (сторону поворота), но и оценить величину угла разворота ЛОД. Но при этом процесс обработки информации усложняется, и в условиях мостика может рассматриваться только качественная оценка (как и во всех применяемых описаниях ЗОД). Интересно, что описанный подход совершенно аналогичен и применим и при изменениях скорости хода: разница при этом только в том, что "направляющая линия" ("линия стягивания") совпадает с курсовой чертой при уменьшении скорости и с линией кильватерной струи (направленной по КУ=180°) - при увеличении скорости.
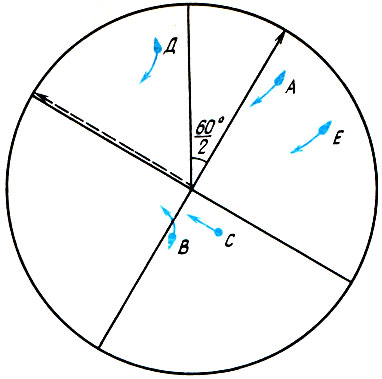
Рис. 4
Например, при уменьшении скорости хода (рис. 5) эхо-сигналы, пеленг которых заметно не изменяется, стягиваются к курсовой черте (направление следа послесвечения изменяется от кормы к носу). Сателлит (судно Д, см. рис. 3 и рис. 5) следует параллельно "направляющей линии", сохраняет параллельность ЛОД и т. д. При изменениях и курса, и скорости "направляющая линия" ориентирована относительно курсовой черты, поэтому рассматриваемый способ может использоваться при ориентации РЛС и "по курсу", и "по северу". Необходимо помнить, что на надежность прогноза влияет учет вероятных маневров судов-целей в рассматриваемых конкретных ситуациях расхождения.

Рис. 5
В заключение необходимо сделать предостережение о том, что предполагаемый способ сам по себе не является панацеей для обеспечения безопасного расхождения.
Прогнозирование (на основе одного из вариантов описания ЗОД) - хотя и важная, но все же только составная часть процесса обработки информации. Необходимо, чтобы судоводители хорошо понимали суть относительного движения, "работу" скоростного векторного треугольника. Эта задача отрабатывается в ходе обучения на радиолокационных тренажерах, где решается большое количество задач на маневренном и антипараллаксном планшетах. При этом у судоводителей развивается понимание закономерностей относительного движения. Принято считать, что на этом основании судоводители могут успешно прогнозировать ситуацию расхождения и глазомерно - на экране РЛС. Это действительно так, когда целей немного: одна или две. Если же целей больше (как в группе промысловых судов), то для их одновременной обработки уже необходим специальный подход, например рассматриваемый способ. Его применение позволяет капитану, не отрываясь от экрана РЛС, в сложных условиях оперативно "проигрывать" варианты маневрирования, а также контролировать расчеты штурмана и тем самым повышать безопасность мореплавания при ограниченной видимости.
САРП выполняет обработку радиолокационной информации и позволяет производить:
• ручной и автоматический захват целей и их сопровождение;
• отображение на экране индикатора векторов относительного или истинного перемещения целей;
• выделение опасно сближающихся целей по установленным критериям: расстоянию кратчайшего сближения Dкр и времени кратчайшего сближения tкр;
• индикацию на буквенно-цифровом табло основных параметров движения и элементов сближения целей;
• проигрывание маневра курсом и скоростью для безопасного расхождения;
• автоматизированное решение нав. задач: счисление пути судна, определение суммарного сноса;
• отображение элементов содержания навигационных карт;
• определение обсервованных координат местоположения судна на основе радиолокационных измерений.
Первичная обработка радиолокационных сигналов: квантование, фильтрация, обнаружение полезных сигналов, обнаружение и опознавание (классификация) объектов, измерение координат объектов; особенности выполнения, используемые критерии.

Вторичная обработка радиолокационной информации: сглаживание координат, выработка параметров движения и кратчайшего сближения, оценка ситуации встречи, планирование и проигрывание маневра; особенности выполнения, используемые критерии. Задержки выработки информации. Влияние датчиков информации (РЛС, гирокомпас, лаг, GPS, пользователь) на точность выработки информации в САРП.
Длина векторов целей на РЛС соответствует в масштабе экрана заданному времени экстраполяции. Изменяя это время, можно изменить и длину векторов и находить точки, в которых окажутся цели через установленное время экстраполяции.
Если на отметку любого объекта, видимого на РЛС, нанести светящийся маркер, то вычисленные в ЭВМ данные об этой цели будут индицироваться в цифровой форме на специальном индикаторе: дистанция и пеленг, Dкр, и Ткр, курс и скорость цели. При этом вычисленные параметры являются текущими, т. е. относятся к настоящему моменту времени.
САРП могут быть успешно использованы и для решения ряда навигационных задач. С их помощью можно:
· определять место судна по пеленгам и дистанциям неподвижных объектов, получая мгновенно необходимые данные. Это позволяет осуществлять в узкостях непрерывный контроль за движением судна по выбранному пути;
· определять Dкр до неподвижных объектов (островков, буев, плавмаяков и т. п.), около которых проложен путь судна. Непрерывно контролируя Dкр, можно заблаговременно изменить курс судна и пройти на заданном безопасном расстоянии от объекта;
· определять свой путь и действительную скорость судна, наблюдая неподвижные ориентиры;
· плавать по изолинии;
· контролировать поворот на новый курс.
В заключение подчеркнем, что наряду с большими достоинствами САРП имеют целый ряд объективных ограничений и недостатков, которые должен учитывать штурман. Так как САРП используют данные от РЛС, то все ограничения РЛС действуют и в САРП. Например, если
РЛС не обнаруживает объекты, то и САРП не будут решать по ним. Если радиолокационная информация подвержена влиянию помех, то и САРП будут испытывать вредное воздействие помех, которые могут вызвать появление ложных целей, ложное срабатывание предупредительной сигнализации, появление погрешностей в расчетах, выполненных САРП. Например, через 3 мин после начала автосопровождения относительный курс объекта вычисляется с погрешностью 3. 5° относительная скорость — с погрешностью порядка 1 уз, дистанция кратчайшего сближения — с погрешностью 0,5. 0,7 мили, время до точки кратчайшего сближения—с погрешностью до 1 мин.
Кроме того, САРП имеют свои собственные ограничения: не все наблюдаемые на экране индикатора объекты автоматически сопровождаются; неустойчиво сопровождаются объекты со слабыми сигналами; данные, вычисляемые САРП, выдаются с запаздыванием, необходимым для набора первичной информации в течение некоторого времени. Надежные результаты расчета основных обстоятельств расхождения с объектом и его элементов движения можно получить не ранее чем через 3 мин.

Несмотря на отмеченные ограничения и недостатки, которые судоводители должны знать и учитывать, умелое использование САРП для расхождения со встречными судами и решения навигационных задач, безусловно, способствует снижению навигационной аварийности.
В САРП предусмотрена световая и звуковая сигнализации:
• об опасно сближающихся целях в случае, когда значения Dкр, и tкр какой-либо сопровождаемой цели становится меньше допустимых величин, выбранных оператором;
• о сбросе цели с автосопровождения. Критерием сброса цели с автосопровождения является необнаружение эхо-сигнала от цели в течение нескольких (например, семи) последовательных оборотов антенны;
• о появлении новой цели при автозахвате;
• о выходе своего судна за пределы обозначенного на экране индикатора фарватера;
• о неисправностях работы РЛС.
Метод параллельных индексов. В ряде САРП имеются устройства для проведения линий через произвольные точки экрана индикатора ситуации. Эти линии могут быть использованы для проведения границ опасных зон (рис. 20.8) или параллельных индексов, по которым должен перемещаться приметный радионавигационный ориентир при движении судна по заданной траектории без отклонений. Параллельные индексы проводятся от навигационного ориентира и поворотных точек в сторону, противоположную курсу судна (рис. 20.9)

Современные условия встреч судов в море значительно изменились. Возросла плотность и интенсивность движения, увеличились размеры судов, соответственно, ухудшилась маневренность, уменьшился экипаж, обеспечивающий безопасное судовождение. Эти факторы ведут к понижению безопасности расхождения судов.
Повышение интенсивности и плотности движения судов ведет к тяжелым последствиям. Особенно чреваты столкновения военных кораблей или столкновения военного корабля с транспортным судном. К трагедии может привести столкновение с атомной подводной лодкой или с надводным кораблем, на котором имеется атомное оружие или ядерная энергетическая установка. Столкновения становятся причиной экологических катастроф из-за разлива нефти. Вот почему сегодня необходимы мероприятия, радикально изменяющие проблему предотвращения столкновений.
Автор рассматривает недостатки современных технологий, обеспечивающих безопасное расхождение судов, и уделяет особое внимание несоответствию Правил предупреждения столкновений судов современным условиям судоходства. Предлагает мероприятия, повышающие безопасность судоходства. Рассматривает проект формализуемых Новых Правил (ПРСМ) базирующихся на Методе согласованного расхождения.
Евгений Найденов, капитан дальнего плавания, кандидат технических наук
Неформализуемые правила
Весь путь автоматизации процесса предупреждения столкновений судов зашел в тупик из-за невозможности формализовать МППСС-72. Правила неформализуемы. Их следует радикально изменить, чтобы была возможность на базе Новых Правил создать компьютерные программы.
Процесс управления морскими объектами коренным образом отличается от подобных процессов на других видах транспорта. При опасной встрече судов в большинстве случаев в наличии имеется высокая неопределенность выбора параметров расхождения для опасно сближающихся судов. Такое положение затрудняет расхождение не только для судна, которому по Правилам должны уступить, но даже для судна, которое обязано уступить дорогу, и имеет право выбора – определять процесс маневрирования (решать – необходим ли маневр, выбирать вид маневра, время и дистанцию начала самого маневра).
Изменения в судоходстве. Проблема предотвращения столкновений приобрела особую актуальность с появлением крупнотоннажных судов, маневренные возможности которых, естественно, ухудшились. Увеличилась плотность и интенсивность потоков судов на морских путях, особенно в проливах и на подходах к большим портам.
Ухудшение условий судоходства, а также и другие постоянные причины (слабое техническое обеспечение судов, низкая организация судоходства, некачественные МППСС) не дают возможности понизить вероятность столкновений судов в море. Данные статистики указывают на не снижающийся уровень аварий по этой причине.
Недостатки технических средств. Техническое обеспечение, необходимое для повышения надежности безопасного расхождения судов, отстает от требований изменившихся условий судоходства.
Многие мировые технические новинки не используются на гражданском флоте. Применяемые на крупных судах системы автоматической радиолокационной прокладки – САРП, модернизированные радиолокационные станции – РЛС, автоматические идентификационные системы – АИС, электронно-картографическая навигационно-информационная система – ЭКНИС частично реализуют проблему автоматизации процесса предупреждения столкновений, но не охватывают весь объем научных достижений.
Нынешний уровень развития средств автоматизации производственных процессов, в том числе и судовых, позволяет создать автоматическую автономную систему, значительно уменьшающую функции человека при принятии решений при расхождении судов. Создание таких автономных систем – длительный во времени процесс. Наиболее приемлемый прямой путь – включение ее в создаваемую сейчас под эгидой ИМО систему е-Навигация.
При высокой степени неопределенности математическое описание процесса маневрирования отличается сложностью и недостаточностью изученности. Математические выкладки базируются на использовании основных параметров оценки сближения и маневрирования. Однако некоторые параметры имеют с основными параметрами и факторами дополнительную математическую связь, которая не берется в расчет. Например, формализация ведется на базе известных алгоритмов, дающих неточные результаты. Оценка степени опасности сближения, определяемая по одному параметру – ожидаемой дистанции кратчайшего сближения, не может быть абсолютной. Она еще зависит от скорости сближения судов, от ракурса другого судна, от размера встречного судна и других переменных, которые судоводитель интуитивно или сознательно учитывает при расхождении. Параметры сближения и выбора маневра рассматривать раздельно, как независимые друг от друга величины, нельзя. Разработка этих зависимостей необходима для формирования надежных математических моделей, на базе которых могут создаваться автоматические средства (системы) предотвращения столкновений судов.
Математические модели выбора
Сегодня создано значительное количество математических моделей выбора маневра с разнообразными концепциями. Имея положительную значимость для теоретиков, модели не находят практического использования (не имеют покупателей) из-за их несовместимости с фактическими условиями жизни. Модели разрабатываются на базе множества допущений и ограничений, которые облегчают теоретические выкладки, но искажают реальные условия опасного сближения судов в море. Применять подобные модели в практических условиях опасно: слишком великими могут быть последствия от применения таких допущений в реальных судовых автоматических системах.
Согласно юридическому определению, например, Правило 8, этих людей нельзя допускать к управлению судном. Выполнять Правило 2 и Правило 8, а фактически все правила части B они неспособны. Однако ситуаций, когда им приходится маневрировать судном самостоятельно для предупреждения столкновений, предостаточно.
Правило 17 (b) невыполнимо по своей юридической сущности. По этому Правилу, когда два судна опасно сближаются, одному из них требуется сохранять свой курс и скорость до тех пор, пока оно по какой-либо причине не обнаружит, что находится настолько близко к другому судну, обязанному уступать дорогу, что действиями этого другого (обязанного уступать дорогу судна) уже невозможно предотвратить столкновение.
Имеются другие примеры несоответствия требований Правил современным условиям судоходства.
Метод согласованных расхождений
Новый способ расхождения судов. Один из путей решения проблемы возможности формализации – использование средств сигнализации для согласования действий судов при расхождении.
В современных Правилах уже предусмотрена и используется практика информационной сигнализации (Правило 9, Правило 34 и др.). Такую практику можно расширить. Сигнализация может быть применена для согласования всего процесса расхождения судов – Метод согласованных расхождений. Сущность метода заключается в почти полном исключении неопределенности при опасном сближении. Для исключения неопределенности при оценке сближения встречным судам достаточно надежно (достоверно) знать намерения встречного судна: планирует ли судно маневрировать, моменты начала и окончания маневрирования.
Процесс расхождения будет выглядеть в принципе следующим образом:
Судно, обязанное уступить дорогу, должно идентифицировать, вызвать по УКВ-связи или сигналами другое судно, обязанное сохранять свой курс и скорость, и сообщить ему информацию с дублированием по электронной, по световой, по звуковой сигнализации:
• Намерено ли ОНО (уступающее дорогу судно) маневрировать с целью расхождения или не намерено маневрировать. Эту информацию оно обязано продублировать с помощью отдельного электронного сигнала, видимого на дисплеях, сохраняющего курс и скорость судна, а также с помощью световой и звуковой сигнализации, видимой и слышимой всеми судами вблизи.
• Намечаемое время и/или дистанцию начала своего (судна, уступающего дорогу), также вид маневра. Эта информация однотипно также дублируется электронными, световыми и звуковыми сигналами, но другой формы.
• Сообщить с дублированием сигналами об окончании всех маневров, связанных с данным расхождением.
• Зафиксировать в памяти ЭВМ береговых служб (Власти) и в Организации весь процесс маневрирования. Информация о согласовании и выполнении маневров (указанная в пунктах 1 и 2) записывается в черный ящик всех задействованных в данном расхождении судов, а также в память ЭВМ ближайших береговых служб контроля безопасности судоходства в регионе и в ИМО и хранится там до полного окончания успешного расхождения, затем стирается. В случае чрезмерного сближения или столкновения информация о расхождении архивируется.
Новые правила. Разработанные в соответствии с Методом согласованного расхождения Новые Правила дадут возможность создать компьютерные программы расхождения судов.
Выводы и предложения
Морское сообщество слишком много теряет из-за отсутствия надлежащих Правил предупреждения столкновений судов в море. Применяемые сейчас некачественные Правила увеличивают риск столкновений судов в море. МППСС-72 необходимо радикально изменить в соответствии с требованиями современного уровня судоходства.
Разработанные в 1972 году для условий прошлого века МППСС-72 устарели и требуют нового подхода к решению задачи безопасного расхождения и их радикального пересмотра в соответствии с современными условиями плавания. Правила являются международным законом, требующим неукоснительного и точного их исполнения. Однако МППСС-72 сложны и громоздки. Они разработаны для людей с высоким общим и специальным образованием. Нет количественных характеристик. Установить численные значения многих определений в Правилах трудно. Однако некоторые разработки показывают возможность использования статистических, логических, расчетных данных для установления количественных параметров расхождения. В современном виде Правила не поддаются алгоритмизации. На их основе нельзя разработать компьютерные программы. Невозможность формализации Правил является одним из тормозов разработки математических моделей процесса маневрирования.
Одним из основных направлений, способных уменьшить количество аварий, является организация движения судов на морских путях и в ограниченных акваториях. Необходимо упорядочить движение судов в Мировом океане, используя принцип действия рекомендованных путей и регулируемых перекрестков. Для чего потребуется:
• Обеспечить архивацию в ИМО случаев чрезмерного сближения и случаев столкновений.
• Совместными усилиями судоводителей, математиков и технологов разработать математическую модель расхождения судов, на базе которой можно создать реальную автоматизированную систему предупреждения столкновения судов.
Рассматриваемый в статье Метод согласованных расхождений и ПРСМ не являются истиной в последней инстанции. Предложенные другими судоводителями новые методы решения задачи предотвращения столкновений могут оказаться более эффективными.
По-хорошему, ИМО вообще-то надо было бы объявить конкурс под рабочим названием – КАК УЛУЧШИТЬ МППСС-72?
Читайте также: