Фотограмметрическое программное обеспечение что это такое
Обновлено: 25.05.2024
Развитие современных цифровых фотограмметрических станций обуславливается нескольким факторами, основными являются следующие:
- развитие съемочных авиационных и космических систем
- развитие компьютерной техники
- развитие алгоритмов обработки
- развитие компьютерных сетей
Развитие съемочных авиационных и космических систем.
Съемка Земли из космоса для целей картографии и топографии становится все более распространенной и популярной. Растет число космических аппаратов, улучшается разрешение снимков, растет производительность космических аппаратов. Практически все космические снимки поставляются в настоящее время с т.н. RPC коэффициентами, дающими достаточно точное внешнее ориентирование снимков. Это сильно упрощает фотограмметрическую обработку – добавление нового сенсора в современную ЦФС обычно не представляет существенных сложностей. Однако рост производительности КА требует большей производительности, автоматизации. Основным способом повышения производительности является использование параллельных вычислений и компьютерных кластеров, рассматриваемых.
Для универсальных ЦФС, на наш взгляд, представляют интерес камеры производящие одновременно съемку и в надир и под углом к вертикали. К таким камерам относится среднеформатный аппарат Leica RC-30 Olique. Кадры такой камеры являются снимками центральной проекции, а геометрия съемки особая. Для фотограмметрической обработки такой съемки потребуется специальная доработка ЦФС – изменятся блоки поиска связующих точек и уравнивания. Камеры, снимающие не только в надир, но и под углом к надиру, позволяют получать 3х мерные модели местности с текстурами стен зданий.
Развитие компьютерной техники
Компьютерный кластер, предлагаемый одной из московских фирм
Второй подход к распараллеливанию заключается в разработке специальных алгоритмов для одновременного использования всех ядер одной рабочей станции. Первый тип распараллеливания называется в программировании многопроцессорными (multiprocessing) вычислениями, второй многопотоковыми (multithreading) вычислениями.
Развитие алгоритмов
В последние годы курсы по фотограмметрии постепенно заменяются в ВУЗах на курсы по компьютерному зрению (Computer Vision). О близости этих двух дисциплин говорил на пленарном заседании XXII конгресса ISPR в Мельбурне профессор из Швейцарии Konrad Schindler, об этом же пишет в предисловии к 6-му изданию Manual of Photogrammetry (ASPRS, 2013) главный редактор О. Chris McGlone. В последние годы именно из компьютерного зрения в цифровую фотограмметрию приходят новые алгоритмы.
Несмотря на близость двух дисциплин, стоит отметить и различия между фотограмметрией и компьютерным зрением. От фотограмметрии требуется максимальная точность результата, для достижения этого специальные алгоритмы используют снимки громадных (с точки зрения компьютерного зрения) размеров. Компьютерное зрение решает обычно другие задачи.
В последние годы из Computer Vision в цифровую фотограмметрию пришли алгоритмы построения плотных моделей рельефа на основе минимизации глобальных функционалов, вычисляемых по всем снимкам, алгоритмы кросс-корреляции вытесняются детекторами особых точек и их дискрипторами. Следует ожидать внедрения в ЦФС и алгоритмов из теории распознавания образов. Не менее актуальной является задача перевода облаков точек полученных с помощью лазерной технологии или с помощью алгоритмов построения плотного рельефа в векторную форму с автоматическим выделением домов, дорог и других векторных объектов. Будут развиваться и совершенствоваться другие алгоритмы, связанные с 3х-мерным представлением результатов обработки в ЦФС.
Развитие компьютерных сетей
В последние годы сетевые технологии развиваются очень быстро. В крупных городах провайдеры предоставляют гигабитный доступ к сети интернет по вполне разумным ценам. Фактически скорость доступа в сети интернет сравнивается со скоростью локальной сети предприятия. Рассмотрим, как это может сказаться на развитии ЦФС.
Анна Завтур
Директор по работе
с корпоративными заказчиками компании КРОК
Надежда Гришина
Руководитель направления информационного моделирования компании КРОК
Юрий Чалый
Системный инженер
департамента информационных технологий компании КРОК
В последнее время метод аэрофотосъемки — получения фото с высоты, в том числе и с помощью беспилотных летательных аппаратов (БЛА) — набирает популярность как в архитектурных и строительных, так и в жилищно-коммунальных проектах.
В данной статье мы постарались проанализировать несколько программных комплексов, которые обрабатывают фотографии и строят по ним трехмерную модель. Кроме того, рассмотрели технологию обработки фото, а также методологию работы с программным комплексом и конкретные примеры моделей реально существующих объектов как зарубежных специалистов, так и отечественных, в частности опыт компании КРОК.
Введение
В наше время трехмерные технологии стали весьма востребованы в самых разных областях деятельности. 3Dмоделирование является неотъемлемой частью таких сфер, как наука, промышленность, медицина, кинематограф и т.д.
Фотограмметрия родилась через 13 лет после изобретения фотографии. В 1852 году французский инженер Эмме Лосседа для создания плана местности получил первые перспективные снимки Парижа. Съемка была проведена с воздушного шара.
В наши дни под фотограмметрией [1] подразумевается научнотехническая дисциплина, занимающаяся определением формы, размеров, положения и иных характеристик объектов по их фотоизображениям. Метод получения фотоизображений может быть разнообразнейшим. От аэрофотосъемки с помощью дрона до наземной съемки с использованием автомобиля или даже ручная съемка на планшет или телефон.
Обзор существующих программных продуктов
В настоящее время на рынке присутствует довольно большое количество продуктов для создания трехмерной модели по фотографиям. В результате проведенных исследований были выбраны наиболее соответствующие нашим задачам продукты: PhotoScan (Agisoft), Pix4Dmapper (Pix4D), ContexCapture (Bentley Systems).

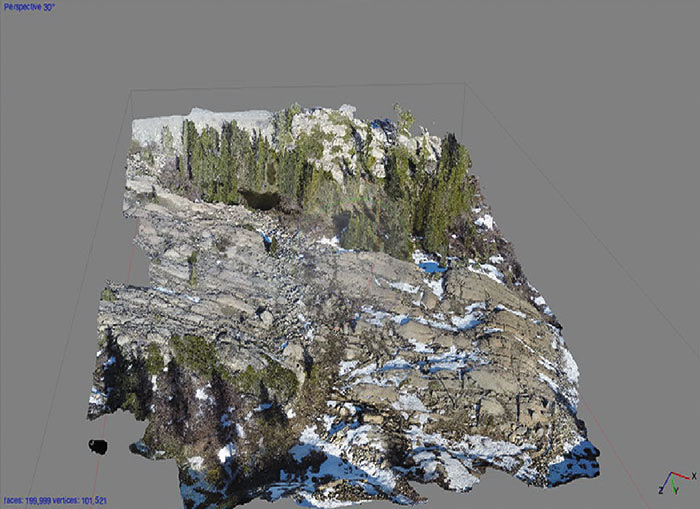
Рис. 1. Результаты съемки после обработки Photoscan
Pix4Dmapper — разработанный в Швейцарии продукт, который сразу же стал использоваться для аэрофотосъемки с БЛА. Pix4Dmapper позиционируется как ведущее решение для работы с ортофотопланами, облаками точек и цифровыми моделями местности (ЦММ) на средних и малых проектах. К его плюсам можно отнести возможность редактирования ортофотоплана, детализацию модели, использование Pix4D большинством производителей БЛА в аппаратной связке с ПО дрона. Из недостатков: низкая производительность, ограниченные возможности масштабирования и взаимодействия с моделью.
ContexCapture — продукт французской фирмы Acute3D, которую в 2015 году поглотила компания Bentley Systems [2]. Продукт характеризуется как решение для автоматического и высокоточного построения 3Dмоделей на основе простых фотографий, получаемых с помощью любого устройства — от смартфона до специализированных камер и сканеров. Решение обладает неограниченной масштабируемостью — от предмета до города. Точность представления ограничена только параметрами фотографий. Также важным преимуществом является возможность генерации не объемного облака точек, а трехмерного массива, который обладает свойствами геометрической модели. Решение выделяется своими промышленными характеристиками. К недостаткам можно отнести относительно слабые возможности по созданию интерьеров.
В итоге мы имеем три уникальных продукта, у каждого из которых есть свой набор как достоинств, так и недостатков.
Опыт зарубежных специалистов
Независимым экспертом [3] было проведено сравнение Pix4D и Agisoft. Для опыта использовался беспилотник DJI Phantom 2 и камера GoPro4. Следуя инструкциям на сайте поддержки Pix4D, была создана траектория полета дрона, настроены скорость и высота полета. Период съемки был установлен равным двум секундам.
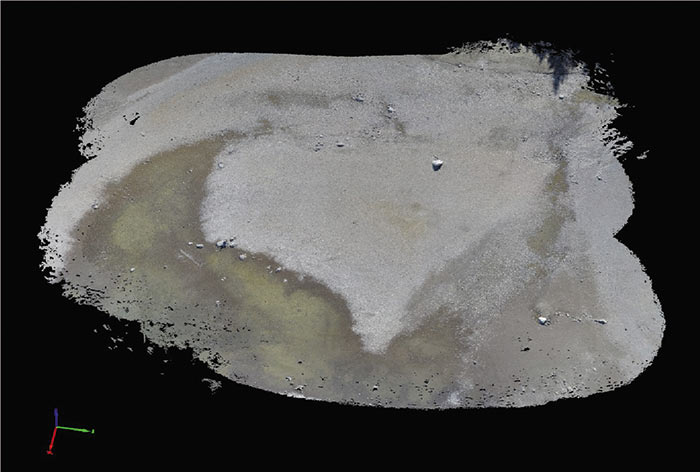
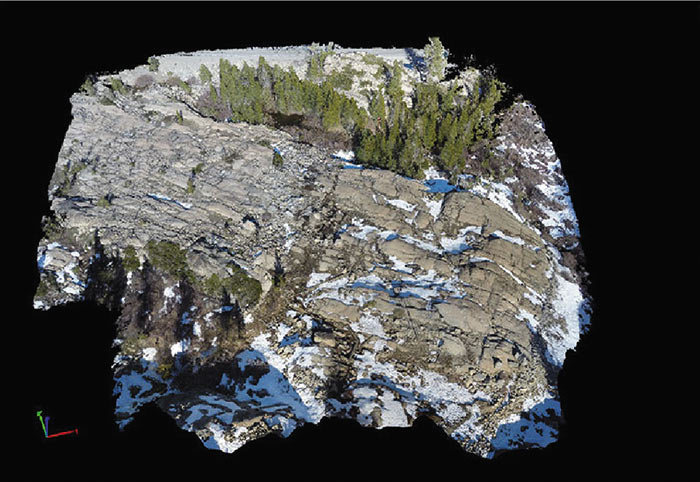
Рис. 2. Результаты съемки после обработки Pix4Dmapper
В результате полета было сделано около 200 фотографий. После загрузки полученного массива фотографий в выбранные программные продукты были получены следующие результаты (рис. 1 и 2).
Следующий опыт [4] был проведен с объектами, для которых важна детализация. Для данных целей выбрали PhotoScan и ContexCapture. Были отобраны несколько скульптур и сделано 28 фотографий. Сборка производилась на рабочей станции со следующими параметрами:
- AMD Phenom X6 1090T @3.20GHz;
- 16 GB Ram DDR3;
- GeForce GTX 750 Ti 2048MB;
- GeForce GTX 465 1024MB.
В результате работы программных комплексов были получены результаты, показанные на рис. 3.
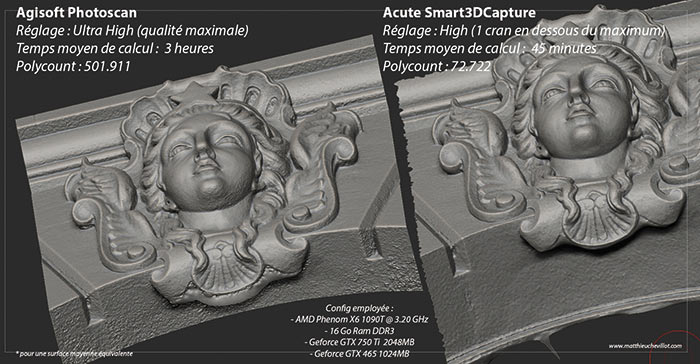
Рис. 3. PhotoScan (слева) и ContexCapture

Рис. 4. ContexCapture (слева) и PhotoScan
Большим преимуществом ContexCapture оказалось время сборки. В обоих случаях PhotoScan потребовалось 3 ч, чтобы собрать модель, в то время как ContexCapture справился за 45 мин. Также было установлено, что ContexCapture повышает разрешение в областях, где были сняты крупные планы, в отличие от PhotoScan.
Еще пример со сборкой более сложных и объемных моделей (рис. 4).
И в этом случае разница во времени оказалась заметной. PhotoScan — час, ContexCapture — 36 мин.
Личный опыт
Перед специалистами КРОК стояла задача получить трехмерный объект офисного здания компании КРОК в кратчайшие сроки. Полученные фото здания со всех сторон были обработаны с помощью ContexCapture. В результате была получена 3Dмодель, которую мы выгрузили в голографический стол для демонстрации. Модель практически не отличается от реального объекта и представляет собой масштабированную копию здания и его окружения (рис. 5).

Рис. 5. Модель здания КРОК в формате виртуальной голограммы
Технологию создания 3Dмодели на основе цифровых фотографий планируется использовать на объектах, по которым нет актуальной технической документации, а также для получения актуальной информации о текущем состоянии строительных площадок. В частности, данная технология уже применялась для получения моделей: транспортной развязки для дальнейшей реконструкции объекта, зданий и сооружений для контроля этапов строительства.
Описание технологии
В данном пункте представлено, как работают современные программные продукты по трехмерной фотограмметрии.
Информация о каждой фотографии записывается в специальный файл: высота, угол поворота камеры, данные долготы и широты. Программа использует технологии машинного зрения и фотограмметрии для нахождения общих точек на многих фотографиях. В результате каждому пикселю на фотографии находится цветовое соответствие на других фотографиях (рис. 6).
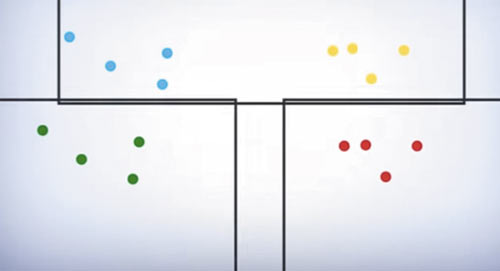
Рис. 6. Пример поиска ключевых точек
Каждое соответствие становится ключевой точкой [5]. Если ключевая точка найдена на трех фотографиях и более, программа строит эту точку в пространстве. Чем больше таких точек, тем лучше определяются координаты точки в пространстве. Следовательно, чем больше пересечений между фотографиями, тем точнее будет модель. Пересечение от 60 до 80% является оптимальным.
Пространственные координаты каждой точки вычисляются методом триангуляции: от каждой точки съемки к выбранной точке автоматически проводится линия зрения, и их пересечение дает искомое значение (рис. 7).
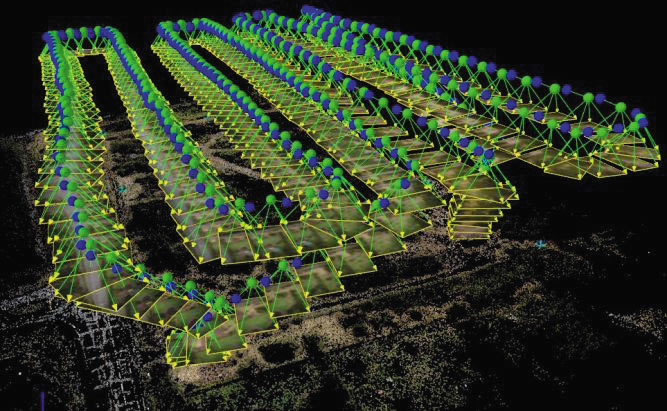
Рис. 7. Ключевые точки относительно модели
Кроме того, в фотограмметрии применяются алгоритмы, целью которых является минимизирование суммы квадратов множества ошибок. Обычно для решения используют алгоритм Левенберга — Марквардта (или метод связок), основанный на решении нелинейных уравнений методом наименьших квадратов.
В процессе обработки фотографий создается расширенное облако точек (совокупность всех 3Dточек), которое используется для генерирования поверхности, составленной из полигонов. В заключение вычисляется разрешение и определяется, какие пиксели на фотографии соответствуют какому полигону. Для этого 3Dмодель развертывается в плоскость и затем пространственное положение точки ставится в соответствие оригинальной фотографии для задания цвета.
Перспективы развития и будущее отрасли
Как и у всякой инновационной отрасли, у трехмерной фотограмметрии есть огромный потенциал для развития: строительство, социальнокультурная сфера, компьютерные игры.
В данный момент мониторинг процесса строительства — весьма актуальная проблема. Уже несколько лет 3Dмодель объекта строительства используют для отображения прогресса стройки. Например, готовая в срок часть объекта на модели отображается зеленым, находящаяся в процессе — желтым, к строительству которой еще не приступили — серым (или скрыта вовсе), а просроченная — красным. Однако эти данные могут быть необъективны, так как не показывают непосредственно строительную площадку, а определить общий прогресс по фотографиям, как правило, довольно тяжело.
Фотограмметрия предлагает инновационное решение этой проблемы. Используется БЛА, который по заданной траектории облетает строительную площадку и производит аэрофотосъемку объекта. Далее массив фотографий выгружается в один из программных комплексов и производится сборка актуальной модели. Установив период облета, будь то неделя или месяц, удается отследить объективный прогресс строительства, который можно использовать для отчетов начальству. С помощью дополнительного ПО можно даже сравнивать эти две модели и подсвечивать разницу в них.
Социальнокультурная сфера — это другая область инновационного применения фотограмметрии. Сейчас в музеях и выставочных центрах во всем мире наиболее популярна технология виртуального тура [6]. Это набор сферических панорам, соединенных между собой ссылками для перехода. У нее определенно есть свои плюсы — это дешево, быстро и просто. Однако и минусов тоже предостаточно: медленная работа, неподвижные точки обзора и визуальные недочеты. К тому же этим уже никого не удивишь.
С помощью фотограмметрии можно создать интерактивный трехмерный тур в виртуальной реальности. Фотореалистичность, универсальность, интерактивность — отличие колоссальное. Цифровой камерой делается массив фотографий, например, скульптуры и комнаты, в которой она находится. Далее этот массив загружается в программные продукты, и после доработки специалистами на выходе мы имеем трехмерную комнату со скульптурой, которую можно буквально обойти вокруг и посмотреть со всех ракурсов.
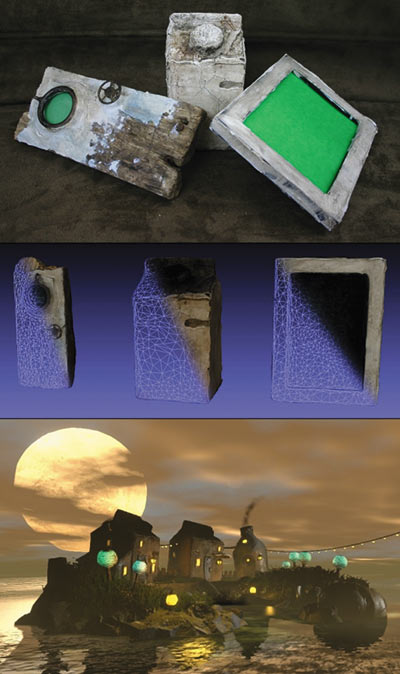
Рис. 8. 3D-модели макетов для компьютерной игры Rustclad
Дополнительные коммерческие возможности этой технологии также гораздо шире своего аналога: тур на сайте, мобильное приложение, выездные экспозиции, создание минидемотура на входе и т.д.
Раньше фотограмметрия применялась преимущественно в геологии, топографии и археологических раскопках. Недавно ее начали применять в киноиндустрии, а сейчас с помощью этой техники создается компьютерная игра Rustclad [7]. Работа над трехмерным квестом только начата. Разработчики опубликовали официальный анонс и видеоролик с демонстрацией того, как они используют фотограмметрию для конструирования игрового мира, создавая цифровые 3Dмодели из сделанных вручную макетов (рис. 8).
Вывод
В публикации представлена лишь малая часть, крупица информации о перспективах развития данной области. Но даже этого достаточно для понимания огромного потенциала трехмерной фотограмметрии. Технология обладает обширными перспективами использования в проектах проектирования, строительства и эксплуатации объектов, таких как дороги, офисные и промышленные здания, памятники архитектуры и пр.
Фотограмметрическая система INPHO предназначена для обработки наиболее сложных фотограмметрических проектов с размером блока 20 000 и более изображений.
Для обработки большого массива данных разработан специальный программный продукт DPMaster, который является удобным инструментом для осуществления распределенной обработки данных. DPMaster доступен для выполнения ортотрансформирования снимков (в модуле OrthoMaster) и автоматического извлечения цифровых моделей рельефа (в модуле MATCH-T DSM).
Кроме того, компания Trimble предлагает инновационные программные решения для обработки цифровых моделей рельефа, включая передовые технологии фильтрации и редактирования данных воздушного лазерного сканирования (LIDAR).
Обеспечивает высокую точность и производительность процесса аэротриангуляции на основе передовых и уникальных алгоритмов обработки изображений, разработанных INPHO. Набор связующих точек и точное блочное уравнивание интегрированы в один полностью автоматизированный процесс.
Модуль MATCH-AT позволяет выполнять полностью автоматическую, высокоточную фототриангуляцию на основе передовых и уникальных алгоритмов обработки изображений. Он не имеет ограничений ни на количество снимков в блоке, ни на форму блока, ни на размер перекрытия между снимками. Автоматический сбор точек проходит по определенному шаблону, обеспечивающему создание надежных связей в блоке, имеется возможность задания шаблона для работы с блоками нестандартной конфигурации. Высокая степень корреляции связующих точек достигается благодаря комбинации объектно-ориентированного метода и метода наименьших квадратов в процессе мультипотоковой обработки данных. Благодаря такому подходу достигается высокая степень надежности автоматически набранных связующих точек даже в таких районах, где мало контуров (лесные массивы и т.п.), а так же в горных районах.
Для работы с блоками аэрофотоснимков на высокогорные территории есть возможность использовать приближенную цифровую модель рельефа (ЦМР). Автоматические алгоритмы успешно работают с перспективными изображениями. Надежный контроль качества связующих точек проходит на каждом уровне обработки.
Кроме того, модуль MATCH-AT имеет удобный инструмент для интерактивного контроля измерений. В измерительный инструмент интегрировано окно графического анализа измеренных точек, в котором обеспечен удобный визуальный контроль точности измерений и связей в блоке.
Для стереонаблюдения поддерживаются несколько режимов работы: анаглифический, с покадровой и построчной разверткой, а также режим поляризационного стерео. Модуль поддерживает обработку мультисенсорных блоков и дает возможность проводить калибровку аэрофотосъемочных систем.

Модуль MATCH-AT доступен в 2 вариантах: MATCH-AT Frame Satellite (для фототриангуляции кадровых снимков, полученных цифровыми и аналоговыми камерами, данных космосъемки и БПЛА) и MATCH-AT Pushbroom (для фототриангуляции снимков линейного сканирования).
Модуль позволяет создавать высокоточные цифровые модели рельефа и местности в полностью автоматическом режиме по данным аэро- или космической съемки. Бесшовные модели создаются для целых блоков изображений, включая лесные территории и территории городской застройки.
Модуль MACTH-T DSM, предназначен для автоматического создания цифровых моделей рельефа и местности по стереопарам аэро- и космических снимков, как на маленькие участки, так и огромные территории.
В модуле реализованы два принципиальных алгоритма по построению трехмерной цифровой модели:
- DTM – метод, позволяющий создавать цифровые модели рельефа, максимально исключая высотные объекты местности (дома, деревья и т.п.). Этот алгоритм подходит для работы с негусто застроенной территорией.
- DSM – метод, извлекающий максимально точную модель местности, отражающую все 3D объекты местности. Этот алгоритм идеально подходит для работы с городской территорией. Он основан на определении каждой точки из обработки всех возможных комбинаций стереопар в блоке. В результате, при использовании снимков с высоким разрешением (не менее 25 см) и значительного перекрытия между снимками в блоке (желательно 60 на 60 %) извлеченная с помощью модуля MATCH-T DSM цифровая модель местности по информативности превосходит даже данные воздушного лазерного сканирования, особенно при работе в блоке с наклонными снимками. В сочетании с дальнейшей обработкой полученной модели в модуле DTMaster Stereo или BuildingGenerator, модуль MATCH-T DSM дает возможность оптимизировать трудозатраты на работу с такой сложной территорией, как городская.
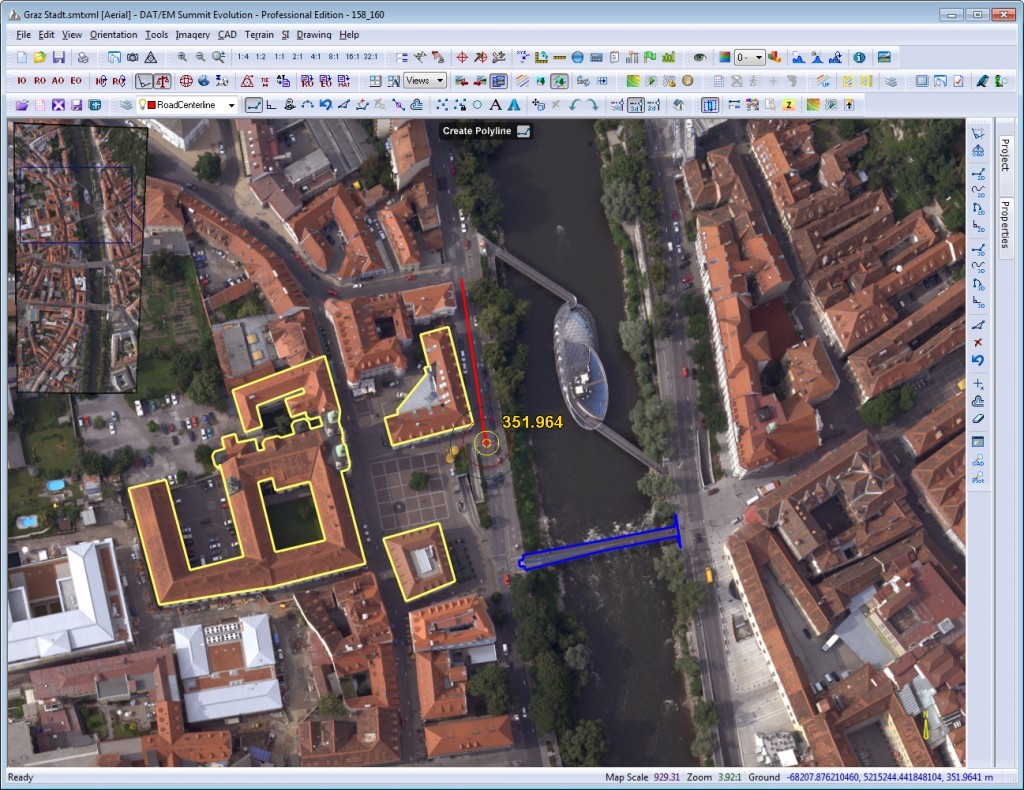
Summit Evolution - усовершенствованный цифровой стереоплоттер для векторизации объектов местности по стереопарам аэро- и космических снимков непосредственно в среде AutoCAD, MicroStation или ArcGIS.
Модуль Summit Evolution является легким в использовании, усовершенствованным цифровом стереоплоттером для векторизации объектов местности по стереопарам аэро- и космических снимков непосредственно в среде AutoCAD, MicroStation или ArcGIS. Широкий диапазон инструментов собран в DAT/EM Capture и Stereo Capture для ArcGIS, которые являются неотъемлемой частью Summit Evolution и позволяют эффективно выполнять стереоизмерения. Собранные с помощью Summit Evolution векторные данные, а так же данные, импортированные из GIS или CAD систем, позволяют создавать и поддерживать в актуальном состоянии векторные карты и GIS проекты. Приложение Summit Evolution может работать в сочетании с другими модулями INPHO, дополняя эти модули удобными и простым инструментом создания 3D контуров.
Варианты поставки программного продукта Summit Evolution:
Professional – полнофункциональная цифровая фотограмметрическая рабочая станция.
Feature collection – предназначена для 3D векторизации.
Lite – недорогая система для визуализации, измерений и базового редактирования в существующих проектах.
Таблица функциональности Summit Evolution:
Ортофотопланы и мозаики
Координация управления и трансформации
Поддержка 3D курсора
Поддержка спутниковых изображений
Импорт сторонних продуктов
Поддержка System Mouse
Создание изображений для AutoCad, ArcGIS, Microstation
Режим просмотра стереоизображений с помощью анаглифических очков
Полный набор панорамирования и масштабирования
Инструменты управления изображениями
Документация по эксплуатации и один год технической поддержки
Импорт с поддержкой программных продуктов
Просмотр 3D стерео на нескольких экранах
Огибание рельефа местности
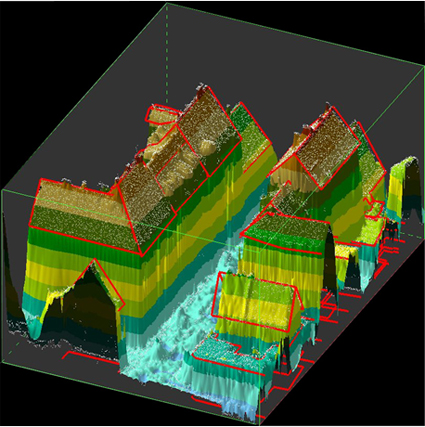
MATCH-3DX предназначен для создания детальных трехмерных точечных облаков и ортофотопланов с минимальными искажениями, а его модуль MATCH-3DX Meshing – для создания фотореалистичных текстурированных сеток.
Рабочий процесс модуля MATCH-3DX основан на алгоритме попиксельного отождествления Semi Global Matching (SGM), который является основным компонентом создания детальных трехмерных точечных облаков. Данные, полученные с помощью этого метода, создают набор данных облака точек, сопоставимый с данными лазерного сканирования.

Трехмерное облако точек, созданное в MATCH-3DX


Создание высокоточных фотореалистичных текстурированных сеток возможно в MATCH-3DX с дополнением MATCH-3DX Meshing. Трехмерные текстурированные сетки часто используются для трехмерного моделирования городов, строительных симуляций и в игровых приложениях.

Текстурированная сетка, созданная при помощи MATCH-3DX Meshing
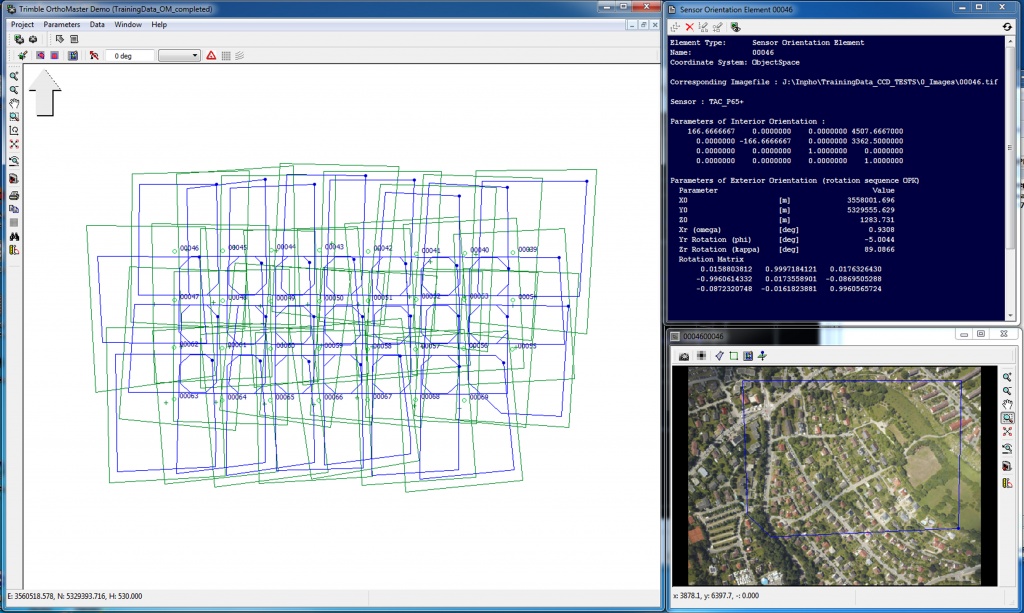
OrthoMaster – профессиональный модуль для строгого ортотрансформирования цифровых аэро- или космических снимков. OrthoMaster предлагает высокую степень автоматизации обработки и оптимизирован для высокой эффективности производства ортофотоизображений, в том числе истинного орто.
Модуль OrthoMaster позволяет выполнять строгое ортотрансформирование аэро- и космический снимков, используя в качестве исходной информации элементы ориентирования снимков и цифровые модели рельефа. Отличительной особенностью данного модуля является его возможность работать с информацией о рельефе практически в любом формате, а так же с комбинацией форматов.
- Повышает качество, скорость и рентабельность производства ортофотопланов.
- Высокая производительность за счет:
- высокой скорости обработки;
- высокого уровня автоматизации;
- минимального количества управляющих воздействий.
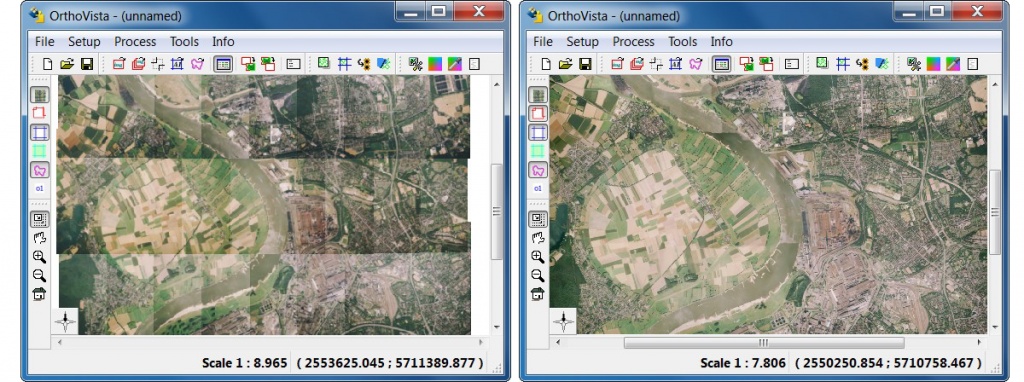
OrthoVista – мощнейший модуль для производства мозаик, использующий передовые технологии обработки изображений для автоматического объединения ортофотопланов и их цветовой балансировки из любого источника в одну бесшовную мозаику.
Модуль OrthoVista использует передовые технологии обработки изображений, позволяющие максимально автоматизировать процесс получения высококачественных бесшовных мозаик из любых ортоизображений на большие территории, минимизируя при этом время трудозатрат. OrthoVista позволяет автоматически генерировать линии сшивки изображений даже на территории с плотной городской застройкой, используя передовые алгоритмы распознавания объектов.
Модуль имеет эффективные инструменты радиометрической коррекции изображений, позволяющие компенсировать визуальные дефекты изображений и выравнивать яркостные и цветовые характеристики сшиваемых изображений.
![OrthoVista.jpg]()
MATCH-3DX предназначен для создания детальных трехмерных точечных облаков и ортофотопланов с минимальными искажениями, а его модуль MATCH-3DX Meshing – для создания фотореалистичных текстурированных сеток.
Рабочий процесс модуля MATCH-3DX основан на алгоритме попиксельного отождествления Semi Global Matching (SGM), который является основным компонентом создания детальных трехмерных точечных облаков. Данные, полученные с помощью этого метода, создают набор данных облака точек, сопоставимый с данными лазерного сканирования.
![Match-3dx-3.jpg]()
Трехмерное облако точек, созданное в MATCH-3DX
![Match-3dx-True-Ortho.jpg]()
![Match-3dx-True-Ortho-1.jpg]()
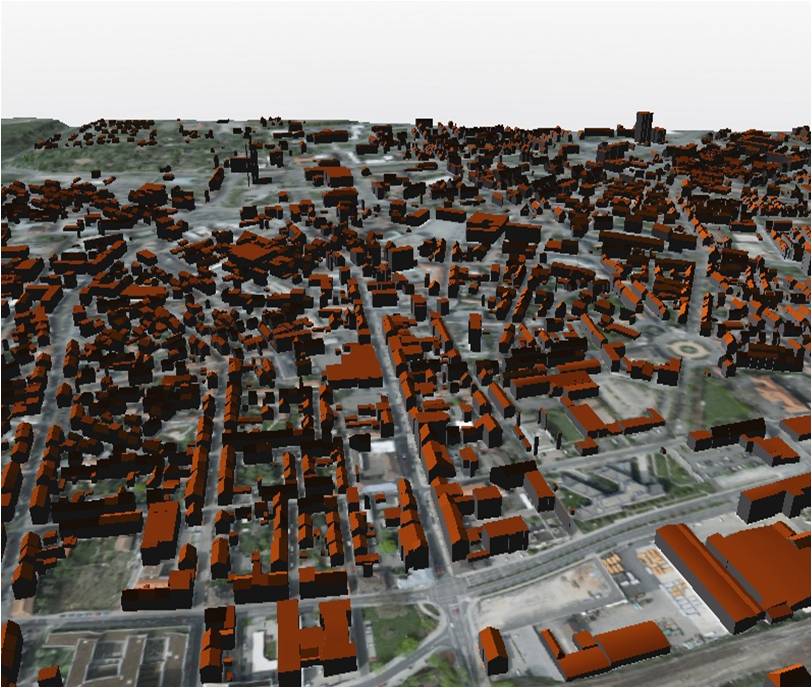
Создание высокоточных фотореалистичных текстурированных сеток возможно в MATCH-3DX с дополнением MATCH-3DX Meshing. Трехмерные текстурированные сетки часто используются для трехмерного моделирования городов, строительных симуляций и в игровых приложениях.
![Match-3dx.jpg]()
Текстурированная сетка, созданная при помощи MATCH-3DX Meshing
Модуль Building Generator создает стандартные формы крыши, такие как, например, односкатные, двускатные. Построения 3D векторов происходит по облаку точек, полученному как по данным лазерного сканирования, так и из обработки стереоснимков. В качестве дополнительной исходной информации необходима кадастровая основа. 3D модели зданий создаются в XML-формате с уровнем детальности LOD2. Требуется обязательное наличие базы данных Oracle Express.
![buildingGenerator.jpg]()
Модуль Building Generator не имеет собственного интерфейса, поэтому рекомендуется использование программы совместно с продуктом City Box (пакет для автоматической генерации и интерактивного редактирования 3D-моделей зданий) для администрирования до 10 000 строений, или novaFACTORY 3D Pro для администрирования более 10 000 строений.
DTMaster Stereo – это современные технологии быстрого и точного редактирования ЦММ и ЦМР, их визуализация, фильтрация и классификация.
Модуль DTMaster Stereo предназначен для визуализации, контроля и редактирования точек цифровых моделей местности и рельефа. Визуализация и редактирование моделей может проходить как в моно, так и в стереорежиме, а так же в режиме перспективной проекции. Модуль позволяет работать с огромными массивами данных, количество точек может достигать сотен миллионов. Это возможно благодаря делению цифровых моделей больших размеров на фрагменты (тайлы) и обработки их в пакетном режиме, при согласовании фрагментов друг с другом. Такой подход позволяет обрабатывать модели рельефа на значительные территории. А благодаря удобному инструменту администрирования работы с фрагментами, обработка больших объемов информации стала проще.
![DTMaster Stereo.jpg]()
В модуль включены разнообразные фильтры, позволяющие в автоматическом и полуавтоматическом режиме классифицировать точки цифровой модели местности, отделяя точки, принадлежащие земле и точки, принадлежащие высотным объектам. С помощью фильтров цифровая модель местности делится на слои: земля, растительность, строения и грубые ошибки. Кроме того DTMaster Stereo позволяет редактировать точки моделей, используя широкий выбор удобных инструментов. В данном модуле можно работать не только с цифровыми моделями местности, полученными после обработки аэро- и космических снимков, но с облаками точек, полученными лазерным сканированием. Помимо этого DTMaster можно использовать как простой инструмент для стереовекторизации и извлечения вспомогательной информации при работе с рельефом.
MATCH-3DX предназначен для создания детальных трехмерных точечных облаков и ортофотопланов с минимальными искажениями, а его модуль MATCH-3DX Meshing – для создания фотореалистичных текстурированных сеток.
Рабочий процесс модуля MATCH-3DX основан на алгоритме попиксельного отождествления Semi Global Matching (SGM), который является основным компонентом создания детальных трехмерных точечных облаков. Данные, полученные с помощью этого метода, создают набор данных облака точек, сопоставимый с данными лазерного сканирования.
![Match-3dx-3.jpg]()
Трехмерное облако точек, созданное в MATCH-3DX
![Match-3dx-True-Ortho.jpg]()
![Match-3dx-True-Ortho-1.jpg]()
Создание высокоточных фотореалистичных текстурированных сеток возможно в MATCH-3DX с дополнением MATCH-3DX Meshing. Трехмерные текстурированные сетки часто используются для трехмерного моделирования городов, строительных симуляций и в игровых приложениях.
![Match-3dx.jpg]()
Текстурированная сетка, созданная при помощи MATCH-3DX Meshing
SCOP++ - эффективная обработка проектов ЦМР (облака точек высокой плотности, лидарные данные или данные из любого другого источника) практически любого размера. Модули SCOP++ предлагают непревзойденное качество интерполяции, фильтрации, управления и визуализации ЦМР.
Модули SCOP++ - отдельное решение, предназначенное для работы с трехмерными моделями местности и рельефа. SCOP++ - это набор модулей позволяющий обрабатывать цифровые модели местности, полученные как лазерной съемкой, так и из обработки стереоизображений.
Модули SCOP++ имеют широкие возможности по обработке и анализу трехмерных данных, в том числе:
![]()
Аэрофотоснимок с небольшой высоты для использования в фотограмметрии. Расположение: Залив Три Арки, Лагуна-Бич, Калифорния.
Фотограмметрия - это наука и технология получения достоверной информации о физических объектах и окружающей среде посредством процесса записи, измерения и интерпретации фотографических изображений и структур электромагнитных лучистых изображений и других явлений.
Есть много вариантов фотограмметрии. Одним из примеров является извлечение трехмерных измерений из двумерных данных (т. Е. Изображений); например, расстояние между двумя точками, которые лежат на плоскости, параллельной плоскости фотографического изображения, можно определить путем измерения их расстояния на изображении, если известен масштаб изображения. Другой способ - извлечение точных цветовых диапазонов и значений, представляющих такие величины, как альбедо , зеркальное отражение , металличность или окклюзия окружающей среды, из фотографий материалов для целей рендеринга, основанного на физических характеристиках .
Фотограмметрия с близкого расстояния относится к сбору фотографий с меньшего расстояния, чем традиционная аэрофотограмметрия (или орбитальная). Фотограмметрический анализ может применяться к одной фотографии или может использовать высокоскоростную фотосъемку и дистанционное зондирование для обнаружения, измерения и записи сложных 2D- и 3D- полей движения путем ввода результатов измерений и анализа изображений в вычислительные модели в попытке последовательно оценить с возрастающей точностью. , фактические трехмерные относительные движения.
С самого начала со стереоплоттерами, которые использовались для нанесения контурных линий на топографические карты , теперь он имеет очень широкий спектр применения, например, сонар , радар и лидар .
СОДЕРЖАНИЕ
Методы
Фотограмметрия использует методы из многих дисциплин, включая оптику и проективную геометрию . Захват цифровых изображений и фотограмметрическая обработка включает в себя несколько четко определенных этапов, которые позволяют создавать 2D или 3D цифровые модели объекта как конечного продукта. Модель данных справа показывает, какой тип информации может входить и выходить из фотограмметрических методов.
В 3D координаты определяют местоположение точек объекта в 3D пространстве . Эти координаты изображения определяют местоположение точек изображений объекта на пленке или электронном устройстве формирования изображения. Внешнее ориентирование из камеры определяет свое местоположение в пространстве и направлениях его просмотра. Внутренняя ориентация определяет геометрические параметры процесса формирования изображения. Это в первую очередь фокусное расстояние объектива, но также может включать описание искажений объектива. Дальнейшие дополнительные наблюдения играют важную роль: с помощью масштабных линейок , в основном известного расстояния между двумя точками в пространстве или известных фиксированных точек , создается соединение с основными единицами измерения.
Каждая из четырех основных переменных может быть входом или выходом фотограмметрического метода.
Алгоритмы фотограмметрии обычно пытаются минимизировать сумму квадратов ошибок по координатам и относительным смещениям опорных точек. Эта минимизация известна как настройка пакета и часто выполняется с использованием алгоритма Левенберга – Марквардта .
Стереофотограмметрия
Особый случай, называемый стереофотограмметрией , включает оценку трехмерных координат точек на объекте, используя измерения, сделанные на двух или более фотографических изображениях, сделанных с разных позиций (см. Стереоскопию ). Общие точки обозначены на каждом изображении. Линия обзора (или луч) может быть построена от местоположения камеры до точки на объекте. Именно пересечение этих лучей ( триангуляция ) определяет трехмерное положение точки. Более сложные алгоритмы могут использовать другую информацию о сцене, которая известна априори , например симметрии , в некоторых случаях позволяя восстанавливать трехмерные координаты только из одной позиции камеры. Стереофотограмметрия становится надежным методом бесконтактных измерений для определения динамических характеристик и форм колебаний невращающихся и вращающихся структур.
Интеграция
Трехмерная визуализация может быть создана путем географической привязки аэрофотоснимков и данных LiDAR в одной и той же системе отсчета, ортотрансформирования аэрофотоснимков и последующего наложения ортотрансформированных изображений поверх сетки LiDAR. Также возможно создавать цифровые модели местности и, таким образом, трехмерную визуализацию, используя пары (или кратные) аэрофотоснимков или спутниковых снимков (например, спутниковые снимки SPOT ). Такие методы, как адаптивное стереосогласование методом наименьших квадратов, затем используются для создания плотного массива соответствий, которые преобразуются с помощью модели камеры для создания плотного массива данных x, y, z, которые можно использовать для создания цифровых моделей местности и ортоизображений . Системы, в которых используются эти методы, например система ITG, были разработаны в 1980-х и 1990-х годах, но с тех пор были вытеснены LiDAR и подходами на основе радаров, хотя эти методы все еще могут быть полезны при построении моделей рельефа из старых аэрофотоснимков или спутниковых изображений.
Приложения
![Файл: Видео 3d модели бюста Горацио Нельсона в музее Монмута, Уэльс, созданное с помощью photogrammetry.ogv.]()
"> Воспроизвести медиа
![Файл: 3d модель Гибралтара 1, созданная с помощью photogrammetry.ogv]()
"> Воспроизвести медиа
Фотограмметрия используется в таких областях, как топографическое картографирование , архитектура , машиностроение , производство , контроль качества , полицейские расследования, культурное наследие и геология . Археологи используют его для быстрого создания планов больших или сложных участков, а метеорологи используют его для определения скорости ветра торнадо, когда невозможно получить объективные данные о погоде.
![]()
Фотография человека, использующего контроллер для исследования 3D-фотограмметрии Future Cities от DERIVE, воссоздающего Токио.
Он также используется для объединения живых выступлений с компьютерными изображениями при пост-продакшене фильмов ; Матрица - хороший пример использования фотограмметрии в кино (подробности см. В дополнениях к DVD). Фотограмметрия широко используется для создания фотореалистичных экологических активов для видеоигр , включая исчезание Итан Картер , а также EA DICE «s Star Wars Battlefront . Главный герой игры Hellblade: Senua's Sacrifice был создан на основе фотограмметрических моделей захвата движения, снятых актрисой Мелиной Юргенс.
Фотограмметрия также широко применяется при проектировании столкновений, особенно в автомобилях. Когда происходит судебный процесс по поводу несчастных случаев и инженерам необходимо определить точную деформацию, имеющуюся в транспортном средстве, обычно прошло несколько лет, и единственное, что осталось, - это фотографии места происшествия, сделанные полицией. Фотограмметрия используется для определения степени деформации рассматриваемого автомобиля, что связано с количеством энергии, необходимой для создания этой деформации. Затем энергия может быть использована для определения важной информации о столкновении (например, скорости во время удара).
Картография
Археология
![]()
Демонстрируя связь между ортофотопланами и археологией , исторические аэрофотоснимками фотографии были использованы для оказания помощи в разработке реконструкции миссии Вентуры , что руководствуются раскопки стен структуры.
![]()
БПЛА Pteryx , гражданский БПЛА для аэрофотосъемки и фотомэппинга со стабилизированной головкой камеры.
Цифровые фотографии, сделанные с рук вблизи надира, использовались с географическими информационными системами ( ГИС ) для записи экспозиций при раскопках.
Фотограмметрия все чаще используется в морской археологии из-за относительной простоты картографирования участков по сравнению с традиционными методами, что позволяет создавать трехмерные карты, которые можно отображать в виртуальной реальности.
3D моделирование
Похожее приложение - сканирование объектов для автоматического создания из них трехмерных моделей. Созданная модель часто все еще содержит пробелы, поэтому часто требуется дополнительная очистка с помощью таких программ, как MeshLab , netfabb или MeshMixer.
Google Планета Земля использует фотограмметрию для создания трехмерных изображений.
Существует также проект под названием Rekrei, который использует фотограмметрию для создания 3D-моделей утерянных / украденных / сломанных артефактов, которые затем размещаются в Интернете.
Читайте также: