
Сколько систем синхронной связи применяется в машинном телеграфе на судах
Обновлено: 12.06.2024
Тест для электромехаников
Воспользуйтесь поиском, чтобы найти интересующий вас вопрос. Достаточно ввести одно слово или часть его, чтобы фильтр заработал.
Количество отображаемых вопросов: 461 .
Правильные ответы отмечены знаком .
Укажите, какие устройства, кроме концентратора (хаба), могут использоваться при передаче данных между сегментами локальной сети:
Укажите, какие типы сетевых кабелей чаще всего используются при создании локальных компьютерных сетей?
Специальный системный файл, который используется как часть оперативной памяти, когда сама оперативная память заканчивается, называется:
Вспомогательная компьютерная программа в составе общего программного обеспечения для выполнения специализированных типовых задач, связанных с работой оборудования и операционной системы называется:
Компьютерная программа, с помощью которой другие программы или операционная система получают доступ к аппаратному обеспечению различных устройств называется:
Укажите аббревиатуру наименования базовой системы ввода-вывода, отвечающей за первоначальную загрузку компьютера после включения:
Укажите, с помощью какого протокола, в большинстве случаев, реализуется присвоение адресов компьютерам в локальных сетях:
Распределенная вычислительная система, позволяющая всем подключенным к ней компьютерам обмениваться данными, а также совместно использовать различные аппаратные и программные ресурсы.
Главные генераторы, полупроводниковые преобразователи гребного двигателя, а также аппаратура цепей главного тока, должны выдерживать перегрузку по току __ % Iном в течение 2 с. Введите числовое значение без указания размерности:
Главные генераторы, полупроводниковые преобразователи гребного электродвигателя, а также аппаратура цепей главного тока должны выдерживать перегрузку по току 250 % Iном в течение __ сек. Введите числовое значение без указания размерности:
Время перекладки лопастей ВРШ с положения полного хода вперед на положение заднего хода, при неработающих механизмах, не должно превышать __ сек для винтов, диаметром свыше 2 м. Введите числовое значение без указания размерности.
Время перекладки лопастей ВРШ с положения полного хода вперед на положение заднего хода, при неработающих главных механизмах, не должно превышать __ сек для винтов, диаметром до 2 м включительно. Введите числовое значение без указания размерности:
Максимально допустимое время поворота движительно-рулевой колонки на 180°, для установок с винтом, диаметром свыше 2 м включительно, составляет не более __ сек. Введите числовое значение без указания размерности:
Максимально допустимое время поворота движительно-рулевой колонки на 180°, для установок с винтом, диаметром до 2 м включительно, составляет не более __ сек. Введите числовое значение без указания размерности:
При применении циркуляционной смазки подшипников масляная система ГЭД должна быть оборудована фильтром и расходной гравитационной цистерной, обеспечивающей подачу масла к подшипникам в течение не менее __ минутной работы с выключенным насосом, если конструкция подшипников не предусматривает нормальной смазки на период выбега судна. Введите числовое значение без указания размерности, например, 25.
Плотность кислотного аккумулятора при t = +15 °C равна r = 1,28 г/см 3 . Какова будет плотность электролита этого аккумулятора при t = +0 °C, если поправка к показаниям ареометра составляет 0,01 г/см 3 на каждые 15 °С? Введите рассчитанное числовое значение без указания размерности, например 1,25.
Значение: . Ответ: 1,27, eсли температура электролита отличается от 15°, то к показаниям ареометра следует прибавить (при температуре выше +15 °C) или отнять (при температуре ниже +15 °C) температурную поправку -0,01 на каждые 15 °С, таким образом при t = 0 °C плотность электролита должна быть 1,27 г/см 3 .
При каких перегрузках гребных электродвигателей не должна срабатывать защита (при соответствующей настройке защиты от перегрузки в главных цепях и цепях возбуждения)?
Судовые электрические машинные телеграфы относятся к системам синхронной связи, которые обеспечивают командную связь между рулевой рубкой и машинным отделением. По принципу действия системы синхронной связи подразделяются на системы импульсного действия и индукционные.
В системах импульсного действия синхронная передача перемещений осуществляется отдельными равными импульсами тока, а перемещение выходных органов, механически между собой не связанных, происходит скачкообразно.
Индукционная система синхронной передачи в отличие от импульсной обеспечивает плавное перемещение выходных органов.
Основными элементами системы синхронной передачи являются: датчик (ведущее звено), посредством которого передаются приказания; приемник (ведомое звено), воспроизводящий переданное приказание, и линия связи между ними.
В настоящее время на судах широко применяется индукционная система синхронной передачи. Основные элементы этой системы - сельсины, которые представляют собой электрические машины с однофазной обмоткой возбуждения и трехфазной синхронизирующейся обмоткой. Однофазная обмотка возбуждения подключается к сети переменного тока и может находиться на статоре или роторе, а трехфазная синхронизирующаяся обмотка соединена в звезду и расположена соответственно на роторе или статоре. В бесконтактных сельсинах обе эти обмотки выполнены на неподвижных частях специальных магнитопроводов.
С точки зрения характеристик системы и принципа действия относительное расположение обмоток не имеет значения.
Принципиальная схема синхронной связи состоящая, из одного датчика и одного приемника, дана на рис. 2.149. Обмотки возбуждения сельсинов получают питание от одного и того же источника переменного тока, а синхронизирующие обмотки соединены между собой таким образом, чтобы их э.д.с. были направлены навстречу одна другой и при одинаковом положении роторов в пространстве были равны, т. е. уравновешивали друг друга.
При повороте ротора сельсина-датчика BG на некоторый угол альфа нарушится равенство э. д. с, индуктируемых в фазах синхронизирующих обмоток сельсина - датчика и сельсина - приемника BE. Между ними возникнет уравнительный ток, который вызовет появление синхронизирующего вращающего момента, направленного в сторону уменьшения угла рассогласования между роторами сельсина-датчика и сельсина-приемника. При закрепленном роторе сельсина - датчика под действием синхронизирующего момента ротор сельсина - приемника повернется на тот же угол альфа, что и ротор сельсина-датчика.
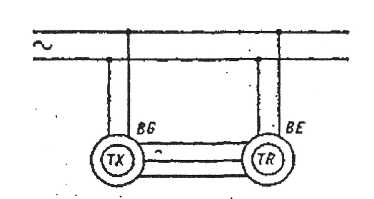
Рис. 2.149. Принципиальная схема индукционной системы синхронной
Система синхронной передачи позволяет подсоединить к одному сельсину - датчику несколько сельсинов - приемников, т. е. получить соответствующее число контрольных постов управления.
Особенностью судового машинного телеграфа, как средства передачи фиксированных команд, является совмещение в одном приборе элементов двусторонней связи - датчика и приемника, работающих на одну общую шкалу с текстами команд, и наличие системы сигнализации. На рис. 2.150 приведена принципиальная схема машинного телеграфа с индукционной самосинхронизирующейся системой передачи.
Основными элементами схемы являются: передатчик - приемник, состоящий из сельсина - датчика BG1, сельсина - приемника ВЕ2, бленкера HL1, зуммера НА1, понижающего трансформатора TV, регулирующего резистора R и четырех ламп накаливания EL для освещения шкал; приемник-передатчик, состоящий из сельсина - приемника ВЕ1 и ответного сельсина - датчика BG2; следящая система с реле сигнализации К и бленкером HL1; прибор контроля реверсирования КР, скомплектованный из двух контактных систем КР1 (А4) и КР2 (А2); сигнальные приборы (звонок НА2, сигнальная лампа HL2 и ревун НАЗ).
Следящая система приемника - передатчика предназначена для автоматического включения сигнальных приборов в машинном отделении при подаче сигнала и их выключения при подаче правильного ответа.
При повороте рукоятки сельсина - датчика BG1 в положение, при котором стрелка устанавливается против соответствующего текста приказа шкалы телеграфа, возникает рассогласование системы и появляется синхронизирующий момент. Ротор сельсина - приемника ВЕ1 повернется на заданный угол поворачивая механически-связанный с ним диск 1 следящей системы. В результате произойдет замыкание контактов а и б. Реле сигнализации К получит питание. Оно сработает и замкнет свои контакты К в цепи ревуна НАЗ и сигнальной лампы HL2, которые сигнализируют вахтенному персоналу машинного отделения о подаче команды. В рулевой рубке включается зуммер НА 1.
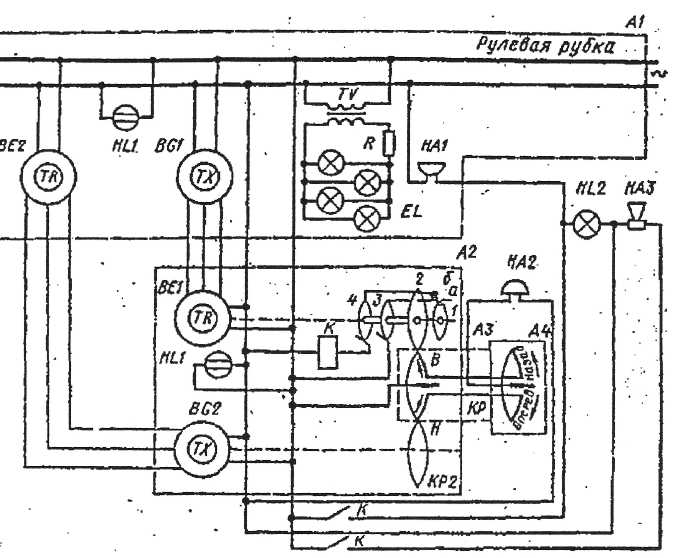
Рис. 2.150. Принципиальная схема машинного телеграфа с индукционной самосинхронизирующейся системой передачи.
При ответе одновременно с поворотом ротора сельсина - датчика BG2 повернутся: диск 2 и контактные кольца 3 и 4, имеющие через систему шестерен механическую связь с ротором сельсина - датчика BG2. Контакт а вновь установится против выреза диска 1. Это приведет к размыканию контактов а и б. В результате обесточится катушка реле сигнализации К, которое разомкнет свои контакты в цепи приборов сигнализации и их действие прекратится.
Контактная система КР1 (А4) прибора контроля реверсирования КР (A3) установлена в пульте управления главными дизелями, а контактная система КР2 (А2) установлена в корпусе приемника - датчика.
Контактная система состоит из латунных сегментов, по которым скользит контактная щетка. В контактной системе КР1 (А4) контактная щетка механически связана с рычагом реверсирования двигателя, а в контактной системе КР2 (А2) контактная щетка через шестеренную передачу соединена с рукояткой сельсина - датчика BG2.
Принципиальная схема рулевого указателя с индукционной самосинхронизирующейся системой передачи приведена на рис. 2.151.
Основными элементами схемы являются: сельсин-датчик BG, имеющий механическую связь с баллером руля; сельсины - приемники ВЕ1 и ВЕ2, один из которых установлен в рулевой рубке, другой - в аварийном посту управления; сигнальные бленкеры HL и лампы подсветки EL. Лампы подсветки включены через понижающий трансформатор TV. Резистором R регулируется яркость подсветки ламп. При перекладке руля поворачивается и ротор сельсина - датчика BG, что вызывает нарушение равновесия в системе, синхронной связи. Это приводит к появлению синхронизирующего, момента, в результате которого повернутся на тот же роторы сельсинов - приемников ВЕ1и ВЕ2. Приемники имеют шкалу, градуированную в градусах (до 40°) в обе стороны от нулевого положения. Указательная стрелка на этих шкалах покажет угол перекладки пера руля.
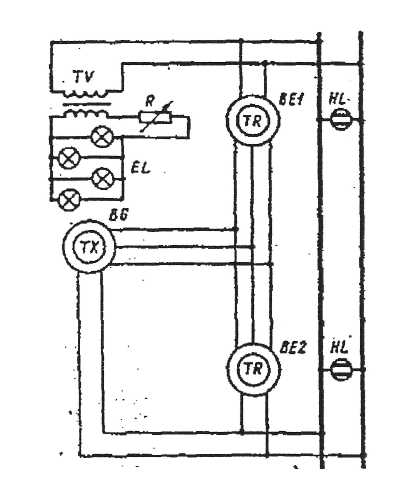
Рис. 2.151. Принципиальная схема рулевого указателя с индукционной
самосинхронизирующейся системой передачи.
На судах, где в качестве основного принят постоянный ток, применяют машинные телеграфы с импульсной системой синхронной связи, принципиальная схема которого показана на рис. 2.152. Схема состоит из двух датчиков В1 и В2, двух приемников U1 и U2, двух сигнальных реле К1 и К2, ревуна НА1 и трещотки НА2. В связи с тем что схема получает питание непосредственно от судовой сети, напряжение которой равно 110 и 220В, а электромагнитные катушки приемников рассчитаны на 55 - 75В, то в цепь катушек включены добавочные резисторы R1 и R2.
Датчики В1 и В2 состоят из коммутатора, представляющего собой барабан из изоляционного материала, на поверхности которого укреплен контактный сегмент, охватывающий дугу 132°. По поверхности барабана скользят три щетки I, II, III, с помощью которых подается питание электромагнитным катушкам приемников U1 и U2. Приемники U1 и U2 состоят из трех парных электромагнитов, расположенных под углом 120° один по отношению к другому, и системы передачи движения (тяги, кривошип, эксцентрик).
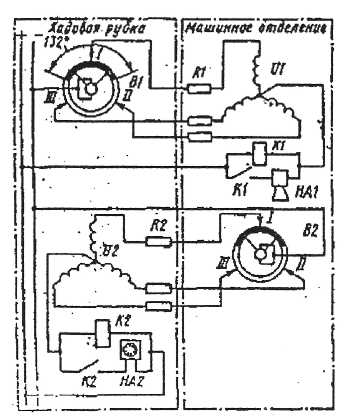
Рис. 2.152. Принципиальная схема машинного телеграфа с импульсной
системой синхронной связи.
При повороте рукоятки датчика В1, расположенного в ходовой рубке, произойдет вращение его барабана, что вызовет последовательное замыкание контактным сегментом щеток I, II и III. В результате попеременно будут получать питание электромагнитные катушки приемника III, расположенного в машинном отделении. Стрелка приемника U1 и стрелка датчика В1 установятся против одного и того же деления шкалы с заданным текстом команды. При вращении барабана датчика В1, получает питание сигнальное реле К1, которое сработает и, замыкая свой контакт К1, подключит на напряжение ревун НА1. С прекращением вращения барабана цепь ревуна разомкнётся. Приняв сигнал, вахтенный механик поворачивает рукоятку датчика, находящегося в машинном отделении, до совмещения стрелок датчика В2 и приемника U1. В ходовой рубке синхронно с вращением барабана датчика В2 будет поворачиваться приемник U2, и его стрелка совместится со стрелкой датчика В1. Это указывает на то, что приказание машинным отделением принято правильно. Одновременно с вращением барабана датчика В2 получит питание катушка сигнального реле К2, которая замкнет свой контакт К2 и включит трещотку НА2. С прекращением вращения барабана датчика В2 цепь трещотки разомкнётся. На судах с постоянным током рулевые указатели работают также по принципу импульсной системы синхронной связи.
Настоящий стандарт СЭВ распространяется на электрические машинные судовые телеграфы, устанавливаемые на морских судах с неограниченным районом плавания, предназначенные для передачи визуальной командной информации об изменении скорости хода и (или) направления движения, состоящие из командных машинных телеграфов (датчиков) и исполнительных машинных телеграфов (приемников).
Настоящий стандарт СЭВ не распространяется на кнопочные телеграфы.
1. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
1.1 . Машинные телеграфы должны изготовляться из коррозионно-стойких материалов или иметь покрытия, защищающие их от коррозии. Подвижные части, от надежности работы которых зависит точность показаний телеграфов, должны быть изготовлены из коррозионно-стойких материалов.
1.2 . Все приборы и оборудование, применяемые в машинных телеграфах, должны быть морского исполнения.
1.3 . Машинные телеграфы должны иметь 3, 9 или 11 команд, которые могут иметь следующие значения:
вперед, стоп, назад - при 3 командах;
полный вперед, средний вперед, малый вперед, самый малый вперед, стоп, самый малый назад, малый назад, средний назад, полный назад - при 9 командах;
полный вперед, средний вперед, малый вперед, самый малый вперед, внимание, стоп, конец маневрам, самый малый назад, малый назад, средний назад, полный назад - при 11 командах.
1.4 . Машинные телеграфы должны иметь выходы к регистратору маневров. Машинные телеграфы могут быть приспособлены к работе с системой дистанционного управления.
Машинные телеграфы должны обеспечивать возможность блокировки устройств силовой энергетической установки (СЭУ) способом, препятствующим работе двигателей в направлении, противоположном заданному.
Машинные телеграфы должны быть оборудованы сигнализацией для информации о неправильном выполнении команд реверсивным устройством ВРШ, если ВРШ не имеет блокировки, срабатывающей в случае неправильного выполнения команд реверсирования.
1.5 . В машинных телеграфах с несколькими синхронными приемниками показания всех приемников должны быть идентичными в пределах допустимых отклонений. Это же требование относится к датчикам телеграфов.
Должна быть предусмотрена установка до трех командных приборов машинного телеграфа, связанных электрической цепью, при этом управление от каждого командного прибора должно осуществляться без переключения постов.
Телеграфы должны быть такой конструкции, чтобы подтверждение принятия команды при наличии нескольких приемников было возможным только от одного приемника.
Масса отдельных блоков машинных телеграфов не должна отличаться от номинального значения более чем на ±5 %.
1.6 . Корпуса машинных телеграфов должны быть светонепроницаемыми.
1.7 . Датчики должны быть приспособлены для монтажа в пультах или на вертикальных переборках и стойках у местных постов управления.
Датчики, устанавливаемые на мостиках, должны быть изготовлены таким образом, чтобы после их монтажа во время подачи команды об изменении скорости хода и (или) направления движения судна рукоятка датчика переставлялась по направлению движения судна.
1.8 . Машинные телеграфы должны иметь сигнализационное звуковое устройство, обеспечивающее подачу сигналов в рулевую рубку и в машинное отделение при передаче команды до ее подтверждения. Звуковой сигнал должен быть слышимым в любом месте машинного отделения при работающих механизмах и по тону звука должен отличаться от других сигналов в машинном отделении.
Звуковое сигнализационное устройство должно работать автоматически при передаче команд и автоматически выключаться после получения правильного подтверждения их приема. При неправильном подтверждении сигнализационное устройство не должно выключаться.
Машинные телеграфы должны быть оснащены световой индикацией наличия рабочего напряжения и иметь возможность оборудования звуковой сигнализацией, срабатывающей при исчезновении рабочего напряжения.
Приемники машинных телеграфов должны иметь выводы для подключения дополнительных устройств звуковой и световой сигнализации.
При сопряжении машинного телеграфа с СДАУ и ВРШ при управлении из рулевой рубки приемники машинного телеграфа должны выполнять команды с одновременной отработкой звукового сигнала.
1.9 . Машинные телеграфы должны обеспечивать возможность присоединения к ним элементов реверсивной системы дистанционного управления главного двигателя или ВРШ.
1.10 . Шкалы датчиков машинных телеграфов должны иметь регулируемое освещение. Свет не должен проходить наружу через конструкционные зазоры корпуса телеграфа.
1.11 . Каждый блок машинных телеграфов должен иметь заземляющий зажим.
Внутри приборов должны находиться электрические схемы.
1.12 . Рукоятки или ручки рычагов машинных телеграфов должны быть выполнены из изоляционных материалов или облицованы такими материалами.
1.13 . Рукоятки датчика или приемника машинного телеграфа должны фиксироваться в середине полей отдельных команд.
При подключении СДАУ и ВРШ к машинному телеграфу должна обеспечиваться возможность плавного перемещения и установки рукояток в любых промежуточных положениях. Погрешность фиксирования рукояток датчиков при наличии двух и более командных постов не должна превышать 0,25 значения угла поля одной команды. Рукоятка не должна самопроизвольно уходить от заданного положения.
1.14 . Стрелки датчиков и приемников должны фиксироваться в середине полей отдельных команд с допустимым отклонением ±0,25 значения угла поля, охватывающего одну команду.
1.15 . Машинные телеграфы должны обеспечивать правильность показаний при условиях, указанных в табл. 1 .
Машинный телеграф был широко распространен в эпоху парового флота. На современных судах управление силовой установкой автоматизировано и осуществляется дистанционно.
Связанные понятия
Брашпиль (нидерл. Braadspil) — палубный механизм лебёдочного типа, представляющий собой (в простейшем варианте) горизонтальный ворот.
Шлюпба́лка — устройство для спуска шлюпки с борта корабля (судна) на воду и подъёма её на борт. При этом каждую шлюпку обслуживает две шлюпбалки, чем обусловлено частое использование термина во множественном числе.
Клюз (нидерл. kluis) — круглое, овальное или прямоугольное отверстие в фальшборте, в палубе или в борту, окантованное литой рамой или металлическим прутком, служащее для пропускания и уменьшения перетирания якорной цепи, швартовных концов или буксирного каната.
Ходовая рубка — специальное помещение, размещающееся в корабельной рубке или в надстройке, из которого осуществляется управление кораблём на ходу. Оборудование ходовой рубки состоит из приборов и устройств, необходимых для управления рулём, энергетическими установками, контроля за скоростью, курсом, пройденным расстоянием и глубиной под килем, связи с командным пунктом и боевыми постами корабля, наблюдения за окружающей обстановкой с помощью радиолокационных и гидроакустических средств и применения.
Кабеста́н (фр. cabestan), в морском деле также шпиль — механизм для передвижения груза, состоящий из вертикально установленного вала, на который при вращении наматывается цепь или канат, прикрепленные другим концом к передвигаемому грузу, например якорю.
Выстрел (мн.ч. выстрела) — рангоутное дерево или металлическая балка, прикреплённые к борту судна (корабля) шарнирным соединением.
Твинде́к (англ. tween-deck) — междупалубное пространство внутри корпуса грузового судна (сухогруза, а для балкеров, танкеров, газовозов, контейнеровозов, цементовозов, костеров и прочих торговых судов это неприемлемо) между двумя палубами или между палубой и платформой. При наличии трёх палуб различают верхний и нижний твиндеки, при большем количестве палуб — верхний твиндек, второй твиндек, третий твиндек и далее, сверху вниз. Твиндек служит для размещения грузов или пассажиров и экипажа.
Пиллерс (от англ. pillar — колонна или столб) — несущий элемент судового набора на который укладываются палубные бимсы. Представляет из себя одиночную вертикальную опорную стойку, которая служит опорой для корабельной палубы принимая на себя её вес, а также вес палубного груза и оборудования.
Ру́бка (от нидерл. roef — каюта) — закрытое сооружение специального назначения на палубе надводного судна, корабля или на палубе надстройки.
Мо́стик — ограждённая часть палубы верхних ярусов надстроек и рубок или отдельная платформа. Мостики предназначены для размещения постов управления, наблюдения или связи, а также для перехода из одной надстройки в другую.
Шварто́вка — процесс подхода судна и его крепление к причальной стенке, пирсу или другому судну. Крепление производится с помощью синтетических или стальных тросов, называемых швартовными концами.
Корпус судна — основная часть судна в виде водонепроницаемого и полого внутри тела обтекаемой коробчатой (для надводных судов) или цилиндрической (для подводных лодок) формы.
Валопровод — комплекс устройств, механизмов и соединений, служащих для передачи крутящего момента от двигателя к движителю и передачи упорного давления от последнего корпусу судна.
Гак (нидерл. Haak) — морское название крюка, которое, возможно, пришло из Голландии во время правления Петра I.
Судово́й руль (от нидерл. roer) — элемент корабельного пассивного рулевого устройства, вертикальная пластина (перо руля), поворачивающаяся на оси (баллере) в кормовой подводной части судна. Служит для поворота корабля в ту или иную сторону при движении.
Надстро́йка судова́я — закрытое сооружение на главной палубе судна, расположенное от борта до борта, либо отстоящее от бортов на небольшое расстояние, не превышающее 4 % от ширины судна.
Транцевая корма — тип образований кормы судна, при котором она имеет плоский срез в подводной части, прямые очертания в плане и вертикальной плоскости.
Сходня или сходни (англ. gangway) — нестационарная, переносная доска со специальными планками для предотвращения скольжения обуви, которая оборудована леерным ограждением и служит для перемещения с судна на берег и обратно. В последнее время доску заменяют в ступенчатым исполнением (ступеньки специально изогнуты). Сама доска делается из лёгкого сплава типа дюралюминия или из доски с дюралюминиевыми рёбрами жёсткости. Верхняя сторона сходни снабжена крюками, а противоположная сторона оборудована колёсами.
Котельное отделение (англ. boiler compartment, boiler-room) — специальное помещение на судне или корабле, в котором устанавливаются паровые котлы главной энергетической установки, а также оборудование и устройства, необходимые для собственной работы котлов. Также в нем может размещаться ряд вспомогательных механизмов корабля. Расположение котельных отделений на корабле может чередоваться с размещением машинных отделений (эшелонное расположение энергетической установки) или располагаться одно за другим.
Кильблок — элемент опорного устройства, часто используемый с клеткой и предназначенный для установки судна в безводном положении.
Пла́нширь (или пла́ншир) (от англ. plank-sheer) — горизонтальный деревянный брус или стальной профиль (стальной профиль может быть обрамлён деревянным брусом) в верхней части фальшборта или борта шлюпок и беспалубных небольших судов.
Спардек — разновидность облегченной верхней палубы, предназначенной для защиты перевозимого груза от действия морских волн. Как правило, спардеком оснащались только гражданские трёхпалубные суда, на которых спардек размещался над главной палубой и из-за чего они часто назывались спардечными. Опыт эксплуатации таких плавсредств показал, что их строительство не является целесоообразным, так как спардек не принимает участия в усилении общей продольной прочности судовых конструкций.
Таль (от нидерл. talie) — подвесное грузоподъёмное устройство с ручным или механическим приводом, состоящее из подвижного и неподвижного блоков и основанного в их шкивах троса (лопаря) или металлической цепи.
Якорное устройство — одно из корабельных устройств, совокупность технических средств, назначением которых является удержание корабля на месте относительно берега, волны, ветра или течения при стоянке его на рейде — в гавани или на морском мелководье. В составе якорного устройства имеются якоря, якорные цепи и приспособления для отдачи, подъёма, крепения и хранения якорей и якорных цепей (якорные клюзы, шпили, брашпили, стопора).
Якорная цепь (канат) иногда якорь-цепь — составляющая часть якорного устройства, служит для соединения якоря с корпусом судна.
Бортовая качка — переменное наклонение плавающего судна на правый и на левый борт под действием волнения или других внешних сил.
На современных крупных судах дымовая труба — удлинённая вертикальная или с наклоном в сторону кормы судна конструкция, возвышающаяся над надстройками (рубками) судна и предназначена для отвода продуктов горения в атмосферу. Является важной частью архитектурного оформления силуэта судна. Представляет собой кожух, внутри которого находятся газо-выхлопные, дымоходные трубы, глушители и т. п. Кожухи имеют различную форму. Иногда на судне ставится декоративная фальштруба, не связанная с машинным отделением.
Кингсто́н — задвижка или клапан, перекрывающий доступ в корабельную (судовую) систему, сообщающуюся с забортной водой. Расположен в подводной части корабля (судна). Используются для приёма забортной воды или откачки жидкости за борт. Возможны разные конструкции клапана.
Судовой отсек — пространство в корпусе корабля, ограниченное по длине сплошными поперечными переборками, по ширине бортами или сплошными продольными переборками.
Диффере́нт — морской термин, разница осадок судна носом и кормой. Угол дифферента — угол отклонения плоскости мидель-шпангоута от вертикали. В авиации для обозначения такого же угла, задающего ориентацию летательного аппарата, используется термин тангаж.
Корма́ — задняя часть корпуса корабля (судна), подразделяется на надводную и подводную части. Форма подводной части кормы в определённой мере влияет на управляемость судна и сопротивление воды его движению. Форма надводной части кормы зависит от предназначения корабля (судна) и его размеров. Кормовая часть корабля была обычно рядом с управляющими элементами корабля (руль, судовые колёса, винт и т. д). Поэтому кормовая часть корабля обычно принадлежала капитану и в этой части корабля находились капитан.
Фальшборт (англ. bulwark) — ограждение по краям наружной палубы судна, корабля или другого плавучего средства представляющее собой сплошную стенку без вырезов или со специальными вырезами для стока воды (просветы между ширстреком и самим фальшбортом), швартовки (клюза) и прочими. Это конструкция из дерева или стальных листов с подпирающим набором (в зависимости из какого материала строилось плавучее средство).
В настоящий глоссарий не включены термины, применяемые для обозначения типов кораблей и судов, которые (за исключением многозначных терминов) вынесены в отдельный глоссарий Морские термины (типы кораблей и судов)
Гребно́й винт — наиболее распространённый современный движитель судов, а также конструктивная основа движителей других типов.
Галью́н (нидерл. galjoen — нос корабля) — первоначально свес в носу парусного судна для установки носового украшения судна.
Салинг (нидерл. zaling) — часть рангоута, деревянная или металлическая рамная конструкция, состоящая из продольных (лонга-салингов) и поперечных (краспиц) брусьев, служащая для соединения частей вертикального рангоута (мачты и её продолжения в высоту — стеньги или стеньги и брам-стеньги, и так далее), предназначена также для отвода бакштагов (брам-бакштагов, бом-брам-бакштагов) и для разноса в стороны вант (стень-вант, брам-вант и бом-брам-вант). Иногда салинги служат опорой для наблюдательных и.
Нос — передняя часть судна, противоположная корме. Устроен таким образом, чтобы сократить до минимума сопротивление воды. Передняя оконечность носа судна называется форштевнем.
Кнехт (чаще мн. Кне́хты, устар. кнек; от нидерл. knecht) — парная тумба с общим основанием на палубе судна, служащая для крепления тросов.
Командно-дальномерный пост (сокращённо: КДП) — башенноподобная, как правило, бронированная конструкция на мачте или высокой надстройке корабля. Служит для установки оптических дальномеров, визира центральной наводки, индикаторов РЛС и других устройств. Командно-дальномерный пост выполняет функцию командного пункта управляющего артиллерийским огнём. Наведение КДП может производиться при помощи электрического привода или вручную, пост может также защищаться противоосколочным бронированием. Вес КДП.
Двойное дно — кораблестроительный термин, часть корпуса судна: водонепроницаемый настил, привариваемый к верхним кромкам днищевого набора (флорам, вертикальному килю, стрингерам) на расстоянии нескольких футов от основного дна. Двойное дно является платформой, несущей большую часть нагрузки от перевозимых грузов, энергетические установки и прочие механизмы; при повреждении днища предотвращает попадание воды в корпус судна, а на танкерах — разлив нефти.
Ют (от нидерл. hut) — кормовая надстройка судна или кормовая часть верхней палубы. Ют, частично утопленный в корпус судна, называется полуютом. Старинное название шканцев и юта — ахтерзейль-кастель.
Непотопляемость — способность судна оставаться на плаву и не опрокидываться при повреждении его корпуса и затоплении одного или нескольких отсеков. Также — раздел теории корабля, изучающий это мореходное качество.
1.1 . Машинные телеграфы должны изготовляться из коррозионно-стойких материалов или иметь покрытия, защищающие их от коррозии. Подвижные части, от надежности работы которых зависит точность показаний телеграфов, должны быть изготовлены из коррозионно-стойких материалов.
1.2 . Все приборы и оборудование, применяемые в машинных телеграфах, должны быть морского исполнения.
1.3 . Машинные телеграфы должны иметь 3, 9 или 11 команд, которые могут иметь следующие значения:
вперед, стоп, назад - при 3 командах;
полный вперед, средний вперед, малый вперед, самый малый вперед, стоп, самый малый назад, малый назад, средний назад, полный назад - при 9 командах;
полный вперед, средний вперед, малый вперед, самый малый вперед, внимание, стоп, конец маневрам, самый малый назад, малый назад, средний назад, полный назад - при 11 командах.
1.4 . Машинные телеграфы должны иметь выходы к регистратору маневров. Машинные телеграфы могут быть приспособлены к работе с системой дистанционного управления.
Машинные телеграфы должны обеспечивать возможность блокировки устройств силовой энергетической установки (СЭУ) способом, препятствующим работе двигателей в направлении, противоположном заданному.
Машинные телеграфы должны быть оборудованы сигнализацией для информации о неправильном выполнении команд реверсивным устройством ВРШ, если ВРШ не имеет блокировки, срабатывающей в случае неправильного выполнения команд реверсирования.
1.5 . В машинных телеграфах с несколькими синхронными приемниками показания всех приемников должны быть идентичными в пределах допустимых отклонений. Это же требование относится к датчикам телеграфов.
Должна быть предусмотрена установка до трех командных приборов машинного телеграфа, связанных электрической цепью, при этом управление от каждого командного прибора должно осуществляться без переключения постов.
Телеграфы должны быть такой конструкции, чтобы подтверждение принятия команды при наличии нескольких приемников было возможным только от одного приемника.
Масса отдельных блоков машинных телеграфов не должна отличаться от номинального значения более чем на ±5 %.
1.6 . Корпуса машинных телеграфов должны быть светонепроницаемыми.
1.7 . Датчики должны быть приспособлены для монтажа в пультах или на вертикальных переборках и стойках у местных постов управления.
Датчики, устанавливаемые на мостиках, должны быть изготовлены таким образом, чтобы после их монтажа во время подачи команды об изменении скорости хода и (или) направления движения судна рукоятка датчика переставлялась по направлению движения судна.
1.8 . Машинные телеграфы должны иметь сигнализационное звуковое устройство, обеспечивающее подачу сигналов в рулевую рубку и в машинное отделение при передаче команды до ее подтверждения. Звуковой сигнал должен быть слышимым в любом месте машинного отделения при работающих механизмах и по тону звука должен отличаться от других сигналов в машинном отделении.
Звуковое сигнализационное устройство должно работать автоматически при передаче команд и автоматически выключаться после получения правильного подтверждения их приема. При неправильном подтверждении сигнализационное устройство не должно выключаться.
Машинные телеграфы должны быть оснащены световой индикацией наличия рабочего напряжения и иметь возможность оборудования звуковой сигнализацией, срабатывающей при исчезновении рабочего напряжения.
Приемники машинных телеграфов должны иметь выводы для подключения дополнительных устройств звуковой и световой сигнализации.
При сопряжении машинного телеграфа с СДАУ и ВРШ при управлении из рулевой рубки приемники машинного телеграфа должны выполнять команды с одновременной отработкой звукового сигнала.
1.9 . Машинные телеграфы должны обеспечивать возможность присоединения к ним элементов реверсивной системы дистанционного управления главного двигателя или ВРШ.
1.10 . Шкалы датчиков машинных телеграфов должны иметь регулируемое освещение. Свет не должен проходить наружу через конструкционные зазоры корпуса телеграфа.
1.11 . Каждый блок машинных телеграфов должен иметь заземляющий зажим.
Внутри приборов должны находиться электрические схемы.
1.12 . Рукоятки или ручки рычагов машинных телеграфов должны быть выполнены из изоляционных материалов или облицованы такими материалами.
1.13 . Рукоятки датчика или приемника машинного телеграфа должны фиксироваться в середине полей отдельных команд.
При подключении СДАУ и ВРШ к машинному телеграфу должна обеспечиваться возможность плавного перемещения и установки рукояток в любых промежуточных положениях. Погрешность фиксирования рукояток датчиков при наличии двух и более командных постов не должна превышать 0,25 значения угла поля одной команды. Рукоятка не должна самопроизвольно уходить от заданного положения.
1.14 . Стрелки датчиков и приемников должны фиксироваться в середине полей отдельных команд с допустимым отклонением ±0,25 значения угла поля, охватывающего одну команду.
1.15 . Машинные телеграфы должны обеспечивать правильность показаний при условиях, указанных в табл. 1 .
Читайте также: