
Какой метод используется при решении задачи расхождения со встречными судами на маневренном планшете
Обновлено: 04.05.2024
2) оценки ситуации опасного сближения (столкновения) с судами, эхо-сигналы которых наблюдаются на экране РЛС, путем расчета времени кратчайшего сближения /кр, пересечения /"ер, дистанции кратчайшего сближения DKр и выявления их реальной и потенциальной опасностей;
3) выбора и обоснования маневра, выделения судов, с которыми необходимо расходиться;
4) расчета выбранного маневра с помощью графического перестроения векторных треугольников начальной ситуации;
5) расчета момента начала маневра (с учетом маневренных элементов
Судна), выбирается упрежденное время (3 или 6 мин), дистанция расхождения, время расхождения и дистанция отхода от своего первоначального курса за время маневрирования;
6) нанесение ожидаемой линии относительного движения (ОЛОД) и последующий контроль за перемещением судна-цели (наблюдаемого судна).
Рассмотрим подробно процесс решения задачи на расхождение с помощью графической (радиолокационной) прокладки на маневренном планшете.
1. Для удобства расчетов интервал времени принимает 3 или 6 мин, т е. 1/20 или 1/10 ч.
2. Строим на планшете из его центра вектор курса и скорости VL нашего судна.
Рис. 213. Решение задачи на расхождение с помощью графической прокладки
Рис 214 Определение потенциальной опасности и местоположения судна, для расхождения с которым требуется произвести расчет маневра
3. С появлением на экране РЛС эхо-сигналов определяем их пеленги и дистанции и наносим на планшет.
4. Через равные интервалы времени (3 или 6 мин) в прежней последовательности наносим следующие точки и после их соединения получим векторы относительной скорости.
5. При этих векторах строим векторные треугольники, для чего Vc своего судна из центра планшета переносим в первую точку L Соединив начало своего вектора Vc со второй точкой 2, получим вектор скорости наблюдаемого судна W
6. Линию, соединяющую точки 1 и 2, продлим за центр планшета, получим ЛОД.
Оценка ситуации заключается в определении степени опасности столкновения судов. Находим кратчайшее расстояние DKp, опуская перпендикуляр из центра планшета до ЛОД и точку пересечения курса судна-цели Dnep, для чего проводим из центра планшета линию, параллельную вектору скорости У" суд-на-цели до пересечения с ЛОД
Выявление потенциальной скорости судов можно осуществить двумя способами:
1) проигрываем маневр нашего судна (Vc) или судна-цели (V") и определяем по изменению ЛОД и Vo возможный переход из потенциальной опасности в реальную. Изменение курса, скорости или комбинированный маневр нашего судна вправо ухудшает ситуацию с судном "б". В данном случае маневр необходим с судном "б" (рис. 214);
2) использованием особенностей перемещения эхо-сигналов в относительном движении на экране РЛС, что было подробно разобрано при визуальном методе оценки ситуации.
Для выбора и обоснования вида маневра проигрывают все возможные его варианты: изменение курса, скорости или того и другого одновременно При этом учитываются все факторы, сопутствующие плаванию в условиях ограниченной видимости, навигационных особенностей района плавания, МППСС-72 и маневренных возможностей своего судна и возможного маневра судна-цели. Судоводитель должен стремиться к безопасному расхождению приемлемым вариантом Расчет маневра можно производить при помощи палетки и линейки. Он сводит к минимуму графическую работу по одному-двум судам. На рис. 215 выполнен расчет маневра для безопасного расхождения изменением своего курса вправо. Положение упрежденных точек не оказывает влияния на методику расчета с использованием векторных треугольников начальной ситуации. Следует всегда помнить, что момент упрежденной точки есть условный момент окончания маневра.
Момент начала маневра своего судна рассчитывается с учетом маневренных элементов судна (инерция, торможения, поворотливость и т. д.).
Рис. 215 Расчет маневра для расхождения изменением курса вправо; расчет выполнен с судном "б"
В векторном треугольнике судна "а" вектор нашей скорости поворачиваем вправо на рассчитанный угол. Получаем новый вектор относительной скорости Vo и соединяем точку _2 с концом повернутого вектора Vq. Параллельно вектору относительной скорости V"o из упрежденной точки проводим ОЛОД судна "а". Упрежденная точка берется за один и тот же интервал времени. После этого можно определить время расхождения судов tpicx и дистанцию отхода D0тх от курса нашего судна (см. рис. 215).
Для расчета используем новый вектор относительной скорости W Дистанция отхода рассчитывается на планшете. Для этого на линии нашего нового курса, проложенного из центра планшета, откладываем расстояние, которое пройдет наше судно за время расхождения. Затем из полученной точки опускаем перпендикуляр на линию первоначального курса. Отрезок этого перпендикуляра будет дистанцией отхода от курса в масштабе планшета.
Результат маневрирования контролируется с помощью ОЛОД. На планшет наносится не только ОЛОД судна, относительно которого рассчитан маневр, но и других судов, которые представляют потенциальную опасность. Эти линии ожидаемого относительного движения проводятся для контроля за развивающейся ситуацией после маневра, чтобы своевременно обнаружить маневр других судов, а также в случае допущенных ошибок в расчетах и графических построениях.
Из вышеизложенного видим, что оба метода взаимосвязаны и дополняют друг друга, обеспечивают решение задач на безопасное расхождение судов с помощью РЛС в условиях ограниченной видимости.
На некоторых судах над экраном РЛС установлен зеркальный планшет. Это вспомогательное устройство, являющееся беспаралаксной оптической системой. Преимущество зеркального планшета в том, что он дает возможность вести графическую прокладку, не прерывая наблюдения на экране РЛС.
Периодически повышая квалификацию, судоводители морского флота проходят тренировочные учения по решению задач на радиолокационных тренажерах.
Тип документа: Методическое пособие | doc .
Язык: Русский, Украинский .
Год издания: 2005 .
Методичні вказівки та завдання на виконання контрольної роботи з дисциплін “Тренажер РЛС і ЗАРП” для студентів 4-ого курсу заочної форми навчання Спеціальність 7.100301 “Судноводіння”
Каждый студент согласно своего варианта выполняет 5 задач на бланках маневренного планшета и отвечает на 2 вопроса на отдельном листе. Бланки маневренных планшетов с решенными задачами и лист с ответами подшиваются в отдельную папку.
Вариант контрольной работы выбирается по последней цифре личного шифра.
Вариант №№ задач №№ вопросов
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
Для грамотного выполнения контрольной работы необходимо изучить Правила №№ 5, 6, 7, 8, 9, 10 МППСС-72, а также краткие методические указания по графическому решению задач на маневренном планшете.
На титульном листе папки контрольной работы указать фамилию, имя, отчество студента, номер личного шифра, наименование дисциплины, курс, номер варианта, специальность.
Выполненная работа в установленный срок передается для проверки преподавателю.
К зачету допускается студент, который выполнил контрольную и лабораторные работы.
Краткие методические указания по графическому решению задач на маневренном планшете.
Порядок решения задачи расхождения с одним судном
на маневренном планшете
(см. Приложения 1, 2)
Порядок решения задачи расхождения на маневренном планшете:
Обработка радиолокационной информации включает определенную последовательность действий:
. наблюдение и обнаружение целей;
. глазомерную оценку опасности радиолокационной ситуации сближения и отбор целей для радиолокационной прокладки;
. радиолокационную прокладку - определение элементов движения цели и параметров ситуации сближения;
. расчет маневра расхождения;
. контроль за изменением радиолокационной ситуацией во время маневра до полного расхождения судов.
Глазомерная оценка радиолокационной ситуации. Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом количестве целей отобрать для прокладки опасные и потенциально опасные цели. Глазомерная оценка производится по следу послесвечения, который остается на экране РЛС за эхо-сигналом цели и представляет собой предыдущую траекторию относительного сближения судов. Мысленным продолжением следа послесвечения за эхо-сигналом цели получается линия относительного сближения (ЛОД), по которой определяют дистанцию кратчайшего сближения Д кр.
Глазомерную оценку опасности столкновения можно использовать только тогда, когда судоводитель понимает принцип построения треугольника скоростей, т.е. имеет достаточный навык работы на маневренном планшете .
При глазомерной оценке радиолокационной ситуации для выделения потенциально опасных целей, которые становятся опасными при маневре собственного судна и цели, чрезвычайно важно четко представлять направление разворота ЛОД, которое происходит в результате этих маневров.
Все возможные схемы перемещения эхо-сигналов охватывают следующие три начальные ситуации.
1. Эхо-сигнал перемещается параллельно курсовой черте нашего судна - это может быть встречное судно, обгоняемое судно, обгоняющее судно или неподвижная цель:
. при изменении скорости одного или обоих судов параллельность перемещения эхо-сигнала сохраняется;
. при изменении курса нашего судна ЛОД разворачивается в сторону, противоположную стороне разворота;
. разворот ЛОД (следа послесвечения), если наше судно не маневрировало, указывает на изменение курса цели в сторону разворота;
. эхо-сигнал неподвижной цели всегда перемещается параллельно линии курса нашего судна.
2. Эхо-сигнал перемещается не параллельно курсовой черте:
- через начало развертки - существует опасность столкновения;
- через курсовую линию нашего судна - цель пересекает наш курс;
- по линии, проходящей по корме нашего судна, - наше судно пересечет или уже пересекло курс цели:
. при изменении направления или скорости перемещения эхосигнала, если наше судно не маневрировало, глазомерно нельзя сделать однозначного вывода о виде маневра цели. Вид маневра можно установить только с помощью радиолокационной прокладки;
. разворот нашего судна в сторону эхо-сигнала цели приводит к развороту ЛОД от кормы к носу нашего судна;
. уменьшение скорости нашего судна приводит к развороту ЛОД от кормы к носу нашего судна;
. увеличение скорости нашего судна приводит к развороту ЛОД от носа к корме нашего судна;
. отворот нашего судна от эхо-сигнала не позволяет глазомерно оценить эффективность этого маневра (уменьшается относительная скорость сближения, увеличивается t кр и в результате может произойти резкое изменение направления ЛОД, определяемое только при радиолокационной прокладке).
3. Эхо-сигнал не перемещается - судно-сателлит:
. появление следа послесвечения параллельно курсовой черте - изменение скорости одного или обоих судов;
. изменение курсов одного или обоих судов вызывает появление следа послесвечения, не параллельного курсовой черте.
Радиолокационная прокладка . Относительная прокладка - выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Главное, что интересует судоводителя при обнаружении объекта на экране радиолокатора - насколько опасна наблюдаемая цель.
Степень опасности оценивается по двум критериям:
1. Д кр - дистанция кратчайшего сближения - минимальное расстояние, на которое цель может приблизиться к нашему судну, если никто не будет изменять элементы своего движения (курс и скорость);
2. t кр - интервал времени до точки кратчайшего сближения - интервал времени от момента получения последней точки цели, на основании которой строится линия относительного движения ЛОД, до момента приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Д кр, тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции кратчайшего сближения. Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так ситуация обгона, как правило, менее опасна чем расхождение на встречных (пересекающихся) курсах, даже если Д кр в первом случае меньше, чем во втором.
Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а цели наносим на планшет в соответствующие точки по пеленгу и дистанции, измеренных при помощи РЛС.
Пошаговые действия для оценки ситуации:
1. в центр планшета наносится вектор скорости нашего судна, равный 6-ти минутному отрезку (например, скорость нашего судна 15 узлов, откладываем по курсу 1, 5 мили);
2. делаются замеры пеленга и дистанции встречного судна;
3. в таблицу записываются данные измерения и на планшет наносится первая точка – А1;
4. в полученную точку параллельно переносится и "втыкается " вектор скорости нашего судна;
5. через 3 минуты повторяются пункты 2-3, наносится вторая точка А2. Приближенно оценивается ситуация сближения;
6. еще через 3 минуты повторяются пункты 2-3, наносится третья точка А3;
7. соединив точки А1 – А2 – А3, получаем линию относительного движения – ЛОД;
8. из начала нашего вектора скорости строим вектор V в, который является вектором истинной скорости и курса встречного судна;
9. перпендикуляр, проведенный из центра планшета к ЛОД определяет Д кр (в нашем случае Д кр = 1,7 мили). Величину t кр находим, откладывая по ЛОД отрезки, равные V 0 до Д кр (здесь, примерно, укладывается 1,5 V 0 , т.е. t кр = 1,5 х 6 мин = 9 мин);
10. принимается решение по выбору маневра расхождения.
Рис. 13.14. Построение треугольника скоростей
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна V н при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор V н2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.

Рис. 13.16. Маневр расхождения скоростью
Маневр расхождения скоростью применим для судов водоизмещением до 20000 тонн. В любом случае, при выполнении маневра расхождения необходимо учитывать маневренные характеристики судна.
При выборе маневра расхождения с опасной целью, когда на экране наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для всех потенциально опасных судов. Как правило, на планшет наносится полный анализ ситуации до момента окончания маневра и возвращения к исходным параметрам движения вашего судна.
средство малой механизации для графического решения задач прямолинейного маневрирования. Используется как при боевом маневрировании (занятие позиции для использования оружия, сближение с целью на заданное расстояние, уклонение от встречи и другой задачи), так и при расхождении с судами в море.
-
- 1) доска мензулы, служащая столиком для черчения при съемке; 2) лист бумаги, наклеенный на мензулу, на к-рый наносится план снимаемой местности; 3) отдельный лист топографической карты.
При двустороннем маневрировании скорости изменения дистанции, бокового перемещения и пеленга между кораблями определяются параметрами движения обоих кораблей. Рассуждая аналогично случаю одностороннего маневрирования, получим следующие формулы для решения задач двустороннего маневрирования (рис. 4.4):
где ОВИР - общая величина изменения расстояния; ОБП - общая величина боксового перемещения; ВИП - величина изменения пеленга.
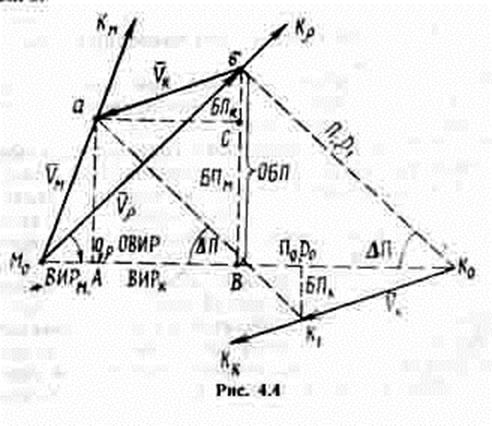
Тогда элементы позиции маневрирующего корабля при двустороннем маневрировании по истечении времени маневра можно представить в виде:
Итак, метод решения задач, базирующийся на применении основных элементов маневрирования, сводится к вычислениям по формулам (4.16) - (4.21).
Так как, пользуясь основными элементами маневрирования, в выражениях разложения расстояния и пеленга в ряд Тейлора
мы учитываем члены только первого порядка, тем самым допуская ошибку, которая численно будет равна остаточному члену ряда. При решении задач маневрирования по формулам (4.19) и (4.21) ошибки будут тем большими, чем больше t. В практике маневрирования допустимо решать задачи по формулам (4.19), (4.21) для промежутков времени маневрирования, равных нескольким минутам. Особенно значительными могут быть ошибки при быстром изменении пеленга, то есть при больших значениях ВИП. Для быстроты решения задач маневрирования с применением ВИР, БП и ВИП пользуются табл. 31а, МТ-75.
Элементы маневрирования можно выразить через относительное движение. Из рис. 4.4 следует:
4.5 Задачи тактического маневрирования
При применении оружия, а также при совместном плавании в ордерах кораблю приходится маневрировать для занятия, удержания или изменения позиции.
В быстро меняющейся обстановке современного морского боя может возникнуть необходимость в кратчайший срок изменить дистанцию, с максимальной скоростью изменить пеленг на противника или, наоборот, сохранить его, изменив дистанцию, и т. д. В каждом конкретном случае необходимо правильно выбрать прием маневрирования.
Для расчета элементов маневра применяются аналитический, табличный, приборный и графический способы.
Аналитический способ заключается в определении искомых величин по формулам. Этот способ чаще применяется при исследовательских разработках, теоретических расчетах и при составлении таблиц. Для решения задач в практике маневрирования способ широкого применения не получил, так как не дает возможности решить задачу достаточно быстро и не обладает наглядностью.
Табличный способ, когда искомые величины находят по таблицам, применяется только при решении некоторых типов задач маневрирования, универсальных таблиц для решения всех задач маневрирования пока не существует. Кроме того, этот способ не обладает достаточными точностью и наглядностью, поэтому широкого распространения на кораблях для решения задач маневрирования не получил.
Широкое применение вычислительной техники, позволяющей быстро и точно определить элементы маневрирования, способствовало тому, что приборный способ стал основным для решения задач маневрирования.
Графический способ решения задач маневрирования прост и удобен. В отличие от других способов он нагляден и позволяет легко проконтролировать все решения. Этот способ обеспечивает достаточные для практических целей быстроту и точность, является наиболее универсальным и автономным. Выполнение расчетов маневрирования графически обязательно даже в том случае, когда решение задачи обеспечивается другими способами. Это дублирование вызывается требованиями живучести управления.
Графическое решение задач маневрирования может выполняться на навигационной карте, на листе бумаги или на маневренном планшете. Маневренный планшет (см. рис. 4.7) представляет собой совмещенные азимутальную и стадиметрическую сетки. Началом координат является совмещенный центр обеих сеток.
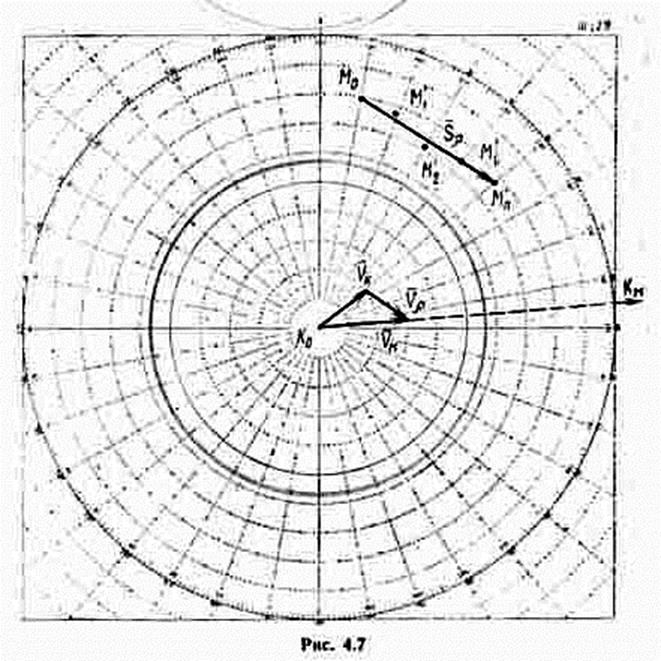
Азимутальная сетка образована рядом радиальных прямых, проведенных из центра планшета через каждые 10°. Стадиметрическая сетка служит масштабной шкалой. Она образована рядом концентрических окружностей, проведенных на одинаковом удалении одна от другой. На внешней окружности стадиметрической сетки нанесены две шкалы градусных делений от 0 до 360°.
Наружная шкала обозначает направления от центра планшета относительно линии 0-180, принятой за меридиан. Внутренняя шкала отличается от внешней на 180, поэтому она используется при нанесении (снятии) обратных пеленгов.
За единицу масштаба на маневренном планшете принимается одно большое деление - расстояние между соседними концентрическими оцифрованными окружностями. Для построения треугольника скоростей это деление принимается равным 1 каб/мин. Масштаб расстояний выбирается в зависимости от дистанции до объекта маневра и тенденции ее изменения. В практике тактического маневрирования наиболее часто одно большое деление планшета соответствует 10 каб.
4.6 Предвычисление (прогнозирование) элементов относительных позиций
Зная элементы движения кораблей и их начальное взаимное положение, можно, построив треугольник скоростей, из позиции М0 провести относительный курс Кr (рис. 4.5), определить (прогнозировать) взаимное положение кораблей на любой момент времени. Типовыми задачами такого рода являются:
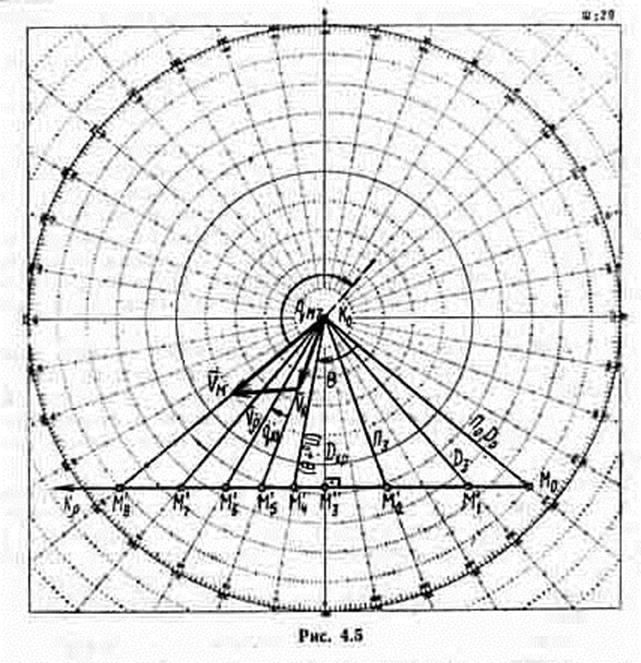
1. Расчет позиции маневрирующего корабля, когда расстояние до объекта маневра равно заданной величине D3.
Для решения задачи нужно раствором циркуля, равным в принятом масштабе заданной дистанции, из точки К0 сделать засечку на линии относительного движения Кr. Полученная точка М '1 соответствует заданному положению между кораблями.
2. Расчет позиции, когда пеленг на объект маневра равен заданному значению П3.
Проведя из точки К0 линию заданного пеленга, получим точку пересечения ее с линией относительного курса Кr, в которой находится позиция М '2 соответствующая поставленному условию.
3. Определение момента, когда расстояние между кораблями кратчайшее Dкр.
Для успешного расхождения с целью на маневренном планшете Ш-26 (Ш-29) необходимо определить:
Через сколько времени цель сблизится с нашим судном на кратчайшую дистанцию (Дкр)
Параметры движения цели (ПДЦ).
Рассчитать возможные варианты расхождения путём изменения курса, скорости (курса и скорости одновременно).
Запомнить.
Масштабы скорости и дистанции на планшете берутся следующим образом:
Дистанция равна 10 кабельтов в одном делении планшета на окружности.
Скорость судна равна 1 кабельтову в минуту или 6 узлам в одном делении планшета на окружности.
(1 кабельтов = 185метров; V = 1каб/минуту = 6 узлов; 1 узел = 0,514 м/секунду)
Дистанция опасного сближения в полную видимость принимается равной 20 кабельтов, что составляет две концентрические окружности (в ограниченную видимость и в тёмное время суток 30 кабельтов - три концентрические окружности).
Решение:
1. Из центра планшета по курсу нашего судна Кс наносим вектор его скорости Vс.
2. По первому замеру Пo и До на цель наносим начальную позицию цели (Мо).
3. По пеленгам и дистанциям, измеренным РЛС с интервалом через 1-2 минуты, наносим на маневренный планшет не менее 3 местоположений цели.
4. Через местоположения цели проводим линию относительного движения (ЛОД) встречной цели. Если ЛОД проходит относительно центра планшета на кратчайшем расстоянии менее 20 (30) каб, то с ней существует опасность чрезмерного сближения.
5. Определяем кратчайшую дистанцию расхождения с целью (Дкр), проведя из центра планшета перпендикуляр на ЛОД. (Дистанция берётся в масштабе 10 кабельтов в одном делении планшета на окружности).
6. Снимаем с ЛОД линию относительного пути (Sρ) от точки первого замера до точки последнего замера (в масштабе 10 кабельтов в одном делении планшета на окружности).
7. Определяем относительную скорость встречного судна (Vρ) по формуле:
Vρ = Sρ / Т = _____ кабельтов : _____ минут = _______ кабельтов/минуту
8. Определяем время сближения с целью на кратчайшую дистанцию (Ткр) в минутах по формуле: Ткр = Sρ1 / Vρ, где:
Sρ1 берётся от точки последнего замера до точки перпендикуляра на ЛОД.
9. Из конца вектора скорости нашего судна Vс проводим в том же направлении линию, параллельную ЛОД, на которой откладываем вектор относительно скорости маневрирующего судна Vρ (в каб/мин.). Необходимо помнить, что вектор относительной скорости Vρ = 1каб/минуту или 6 узлов одном делении планшета на окружности. Получаем точку А.
10. Из центра планшета в точку А проводим вектор Vм и получаем искомые параметры движения встречного судна: курс Км и скорость Vм.
11. Из точки последнего замера П и Д проводим касательные к окружности дистанции опасного сближения, принимаемую равной 20 (30) кабельтов.
12. Из конца вектора Vм проводим в обратном направлении линии, параллельные касательным к окружности дистанции опасного сближения и наносим сектор относительных опасных курсов (СООК).
13. Рассчитываем возможные варианты маневра расхождения с целью, для чего необходимо выйти из СООК:
Поворотом вправо (влево) на курс ______ градусов не меняя скорости;
Уменьшением скорости до _____ узлов не меняя курса.
Дано: Наше судно идёт курсом Кс = 0º со скоростью Vс = 12 узлов. Цель (М) в момент обнаружения находится по пеленгу от нашего судна Пo = 60° в дистанции До = 80 кабельтов. Замеры пеленгов производятся через 1 минуту. Дистанция опасного сближения в полную видимость принимается равной 20 кабельтов (в ограниченную видимость и в тёмное время суток 30 кабельтов).
Замеры: Пo = 60°; Дo = 80 кабельтов; Тo = первая минута
П1 = 59°; Д1 = 76 кабельтов; Т1 = вторая минута
П2 = 57°; Д2 = 72 кабельтов; Т2 = третья минута
П3 = 55°; Д3 = 68 кабельтов; Т3 = четвёртая минута
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Читайте также: