
Как тестируют программное обеспечение беспилотных автомобилей
Обновлено: 05.05.2024
Разработка современных автономных систем – процесс непростой. Полноценная автономность в различных непредсказуемых условиях требует сложных алгоритмов, которые необходимо тщательно тестировать и отлаживать. Для этого обычно создается большое количество дорогостоящих прототипов, что значительно повышает стоимость проекта и затягивает его порой на годы.
Для решения этих проблем при разработке автономных систем мы используем подход модельно-ориентированного проектирования (МОП). Его суть заключается в создании сложных математических моделей, имитирующих поведение объектов реального мира с высокой точностью. Мы создаем виртуальные прототипы устройств, на которых за короткое время удается проводить тысячи виртуальных экспериментов, не боясь ничего сломать и избегая затрат на дорогостоящее оборудование. Алгоритмы мы также разрабатываем в виде моделей, что позволяет верифицировать их большим количеством тестовых сценариев и отловить подавляющую часть ошибок и недоработок еще до создания первого полноценного прототипа.
Такого подхода придерживаемся не только мы. МОП применяют многие компании, ориентированные на создание конкурентноспособных беспилотных и автономных решений. На этой странице вы узнаете, как модельно-ориентированное проектирование повышает эффективность на всех уровнях разработки подобных систем.
Мы оказываем услуги разработки автономных систем под ключ, а также можем пройти весь процесс разработки совместно, чтобы передать вам необходимые навыки и технологии ускоренного создания автономных систем с использованием инструментов моделирования.

- Алгоритмы управления и искусственный интеллект
- Компьютерное зрение и распознавание образов
- Обработка и комплексирование данных с датчиков
- Тестирование в реальном времени
- Реализация на встраиваемых вычислителях
- Сертификация в соответствии с международными стандартами
Алгоритмы управления и искусственный интеллект
Разработка современных автономных систем немыслима без сложных и адаптивных алгоритмов управления. Ведь роботы должны самостоятельно справляться с изменением окружающей среды и даже собственных параметров. А для того, чтобы они могли успешно ориентироваться в пространстве, применяют алгоритмы локализации, картографии, планирования траектории, SLAM, обучение с подкреплением (Reinforcement Learning) и другие методы машинного обучения.
Получается, что разработчикам систем управления приходится решать широкий круг задач: от разработки адаптивных регуляторов и MPC до создания сложных интеллектуальных алгоритмов. Погружение в эти области требует большого количества времени и развития новых компетенций, увеличивает сроки создания и доведения автономных систем до приемлемого функционального уровня и надежности. Не говоря уже о том, что сложные системы управления требуют тщательного тестирования и верификации, а у разработчиков часто отсутствует необходимая инфраструктура и методологические подходы к всестороннему тестированию встраиваемых алгоритмов, особенно на основе ИИ.
Мы профессионально разрабатываем современные алгоритмы управления для различных роботов, в том числе адаптивные и интеллектуальные. Использование инструментов модельно-ориентированного проектирования позволяет нам применять в проектах новейшие наработки в области робототехники, систем управления и машинного обучения, всесторонне их тестировать путем моделирования и быстрого прототипирования за короткие сроки. Помимо услуг разработки алгоритмов управления, мы проводим профессиональные тренинги и передаем необходимые навыки разработки через выполнение совместных проектов.


Компьютерное зрение и распознавание образов
Это направление сейчас активно развивается, в устройствах все чаще применяются стереокамеры, а помимо классических, появляется много новых сложных алгоритмов типа Visual SLAM , обработки облака точек , построения карт глубины и даже алгоритмы искусственного интеллекта, которые не просто применить и оценить на практике. На создание и тестирование таких алгоритмов уходит большое количество времени, что затягивает разработку.
Применение в проектах инструмент ов модельно-ориентированного проектирования позволяет нам быстро оцени ва ть эффективность современных алгоритмов и их комбинаций, реалистично определ я ть границы реализуемости и точности на ранних этапах, имея удобную тестовую среду с самого начала проекта. Мы наработали и используем профессиональные автоматизированные инструменты для маркировки и разметки данных, создания и обучения нейросетей , тестирования и развертывания их во встраиваемых системах. Помимо решения задач разработки систем компьютерного зрения под ключ, мы готовы переда ть все необходимые навыки разработки через выполнение проекта совместно.

Обработка и комплексирование данных с датчиков
Беспилотные системы имеют большое количество датчиков разной физической природы для ориентирова ния в сложном окружении. Инерциальные приборы и GPS , радары и лидары , моно- и стереокамеры – данные со всех сенсоров нужно не только фильтровать от шумов и выбросов, но и комплексировать, то есть объединять для повышения достоверности измерений.
Слияние данных с датчиков – технология Sensor Fusion – становится все более востребованной при разработке систем восприятия . У автономных роботов растёт количество датчиков и требования к достоверности показаний становятся все строже. Инженерам приходится работать на стыке таких областей, как цифровая обработка сигналов, теория управления и встраиваемые системы. Все разработчики беспилотных систем сталкиваются с ростом сложности при разработке алгоритмов комплексирования.
Наши компетенции и навыки модельно-ориентированного проектирования позволяют эффективно управлять растущей сложностью при разработке подсистем цифровой обработки сигналов и комплексирования для автономных систем. Владение широким спектром профессиональных инструментов моделирования , быстрого алгоритмического прототипирования, генерации кода в рамках концепции МОП позволя е т получ ать результат в разы быстрее привычных сроков . Мы нацелены на передачу наших компетенций через совместные инженерные проекты .

Тестирование в реальном времени
Математические алгоритмы автономных систем приходится отлаживать не только на моделях, но и в составе реальных прототипов . П уть дискрет ации , портирования и адаптации кода алгоритма под прототип , даже при применении автосинтеза кода , может быть неоправда н н о затратны м и рисковым , в случае если по результатам теста на прототипе по требу ю т ся существенн ы е структурны е изменени я алгоритмов .
Чтобы срезать риски затрат на очередные модификации и ли избежать ситуации “ вынужденного принятия текущих ограничени й прототипа ” , мы применяем подход быстрого прототипирования с помощью переконфигурируемых машин реального времени. Такие п рофессиональные программно-аппаратные конструкторы позволяют перебрать и примен и ть новые алгоритмы в жестком реальном времени к физически м объекта м управления за считанные минуты . Это позволяет сосредоточиться на оценке самого алгоритм а в реальных условиях еще до его дискретизации и аппаратной оптимизации, полностью избегая ручного написания кода .
Н е стоит забывать, что сырые алгоритмы тестировать на реальных объектах управления попросту опасно , особенно кода речь идет о беспилотных автомобилях и летательных аппаратах. Эти же переконфигурируемые программно-аппаратные стенды решают для нас задачу HiL - тестировани я – когда среда , сценарии и объект управления имитируются на комплексе полунатурного моделирования в реально м времени для тестирования , отладки и предварительной калибровки ЭБУ.

Реализация на встраиваемых вычислителях
Если вы переносите алгоритм на встраиваемые системы путем ручного написания кода, то знаете, насколько этот процесс трудоемкий, а особенно при изменении требований в процессе отладки. Обычно проходят месяцы, прежде чем вам удается запустить первую версию своего алгоритма на встраиваемом вычислителе, чтобы оценить, будет ли он работать, и отладить ошибки, к которым неизбежно примешиваются ошибки кодирования.
В робототехнике на смену ручному кодированию давно пришел подход автоматической генерации исходного кода. Это позволяет получать из сложных алгоритмов C/C++, CUDA и HDL код не за месяцы, а за считанные дни, а также избавляет от ошибок ручного кодирования. Вы можете быть уверены, что полученный исходный код полностью соответствует исходному алгоритму и убедиться в этом путем симуляции. Такая скорость получения встраиваемого кода даёт огромное преимущество с точки зрения возможности менять и настраивать сами алгоритмы в течение всего проекта, а также даёт гибкость в выборе элементной базы. Например, иногда требуется освободить ресурсы GPU, перебросив часть обработки на ПЛИС, или наоборот. Генераторы кода позволяют такие проектные решения осуществлять и проверять в минимальные сроки.
Инструментами кодогенерации мы владеем на глубоком экспертном уровне, многократно подтверждали нашим заказчикам возможности получения из моделей оптимизированного исходного кода для микроконтроллеров, ПЛИС, GPU, ПЛК, а также машин реального времени. Весь сгенерированный код – читаем, трассируем к требованиям, снабжён тестовыми векторами. При этом мы используем инструменты верификации и интерактивной отладки алгоритмов непосредственно на целевой платформе, что повышает качество разработанных систем. Мы обучаем наших клиентов кодогенерации на профессиональных тренингах, а также путем выполнения совместных проектов с передачей экспертизы по тонкой настройке генератора кода.

LIDAR – сердце автопилота
Значение этой системы сложно переоценить, хотя компания Tesla самоотверженно доказывает его бесполезность (все потому, что этот датчик отсутствует в системе беспилотников Тесла). Эксперты называют Лидар ключевым элементом робокаров будущего, а скептики больше внимания уделяют высокой стоимости этой технологии – сегодня цена составляет $10 000. Но обо всем по порядку.
Лидар – это уникальная система, которая обрабатывает сигналы отраженного света и получает данные обо всех объектах, находящихся в поле досягаемости. Именно этот элемент помогает автомобилю видеть других участников движения, дорожные знаки, деревья, здания, а также распознавать дождь, туман, облака.
Преимущества лидара

- Устройство создает 3Д-карту местности и определяет расстояние до любых объектов. Точность – до 2 сантиметров! (погрешность GPS составляет 2 метра – для сравнения).
- Угол обзора – 3600, а дальность действия – до 100 метров. Лидар видит одинаково хорошо как днем, так и ночью, а в отличие от обычных радаров эта технология способна определить шину на дороге (мягкая резина поглощает радиоволны).
- Устройство отлично видит окрестности и позволяет четко определять границы. Эту способность уже оценили логистические компании, которые специализируются на грузоперевозках, а также фермеры – комбайны, оснащенные лидарами обозначают границы поля и не оставляют необработанных полос.
Высокая цена является ключевым и, наверное, единственным недостатком современных лидаров. Стоимость наиболее продвинутых устройств достигает $70 000. Хотя такой ценник не уменьшает спрос – в некоторых компаниях очередь за качественными лидарами составляет полгода.
Снижение стоимости – приоритетная задача, которая стоит перед разработчиками технологии. В 2017 году уже удалось снизить цену до $7500, а немецкая компания-новатор Infineon анонсировала выпуск устройства стоимостью $250. Статичный лидар от инженеров Velodyne обойдется еще дешевле - $50, если будет налажено серийное производство.
Параметры

Размеры лидаров тоже вызывают некоторые вопросы. Первые устройства были габаритными и крепились на крышу Гуглмобилей, что делало их узнаваемыми и неуклюжими. Разработчики осознали, что покупатель не станет мириться с таким положением вещей, и силы были брошены на уменьшение размеров.
Так компании Delphi и Velodyne стали интегрировать свои лидары в автомобильный кузов. Благодаря этому машины сохраняют не только свой традиционный дизайн, но и высокие аэродинамические характеристики.
Команда Volvo в концепт-каре Drive Me разместила лидар впереди авто: пришлось пожертвовать углом обзора – он составляет 140 градусов (дальность действия 150 метров). В итоге автомобиль имеет стандартный внешний вид, а картина 360 градусов получается благодаря датчикам и сенсорами по периметру машины.
Эксперты уверены, что достойных конкурентов устройству LIDAR нет. На сегодняшний день это наиболее эффективная и безопасная система, которая позволяет моделировать максимально точную карту объектов в любых, даже экстремальных условиях.
RADAR
Радары представляют собой системы обнаружения, которые с помощью радиоволн определяют дальность объектов, направление и скорость их движения. На беспилотниках Google их всего четыре, а самоуправляемые модули Tesla оснащены восьмью радарами, которые обеспечивают обзор на 360 градусов, радиусом 250 метров. Увеличенное количество радаров в Тесла-мобилях обусловлено отсутствием лидара.
Особенности:
- Радары могут видеть сквозь снег, туман и пыль, и даже больше – они видят сквозь автомобиль, идущий впереди.
- Сенсоры умеют различать предметы с высокой и низкой плотностью, мягкие и твердые.
- Стоимость радаров ниже, чем цена хорошего лидара – расширенная система автопилота с радарами, камерами и сенсорами повышает цену авто только на $5 000.
Видеокамеры
Они отвечают за обнаружение световых сигналов светофоров, определение объектов, которые приближаются на опасное расстояние. В Гуглмобилях камера устанавливается возле зеркала заднего вида.
Датчик положения
Специальное устройство, определяющее координаты автомобиля на карте с высокой точностью. GPS приемник позволяет отследить местоположение машины и маршрут ее следования.
Карты Google
Эта система позволяет выстраивать карты и получать локальную информацию о расположении любого объекта и оптимальной траектории следования к нему. Технология просмотра улиц позволяет получить максимально точные изображения городских улиц, данные о конкретных элементах, например, парковочных местах.

Это современные системы содействия водителю, которые призваны повысить уровень безопасности управления транспортным средством. Это своеобразное промежуточное звено между классическими авто настоящего и беспилотными модулями будущего. ADAS включает все вышеперечисленные элементы, только количество их может быть разным – все зависит от производителя беспилотника:
- Лазерный дальномер или Лидар.
- Радары дальнего и ближнего действия.
- Ультразвуковые датчики (для автоматической парковки).
- Видеокамеры.
Все эти устройства объединены в одну интеллектуальную систему ADAS, которая отвечает за вождение автомобиля в автономном безопасном режиме.
До беспилотных автомобилей пятого уровня автономности на дорогах осталось совсем немного – требуется усовершенствовать имеющиеся системы, принять соответствующие законы и начать серийное производство. На всех трех направлениях идет активная работа, поэтому беспилотники совсем скоро станут нашим настоящим.

Беспилотные автомобили в ближайшие несколько лет перестанут быть научной фантастикой. В последние несколько месяцев мы стали свидетелями стремительного развития этой технологии. Waymo (ранее проект Google, сейчас является частью Alphabet) два месяца назад запустил свой первый коммерческий сервис с беспилотным такси и в 2021 году планирует открыть завод в штате Миган. Yandex прошлым летом начал тестировать такси без водителей. Volvo выпустила пресс-релиз о переходе на беспилотные грузовики для работы на шахте в Норвегии. Китайская компания DeepBlue Technologies начнет поставлять беспилотные автобусы в Европу уже в 2019 году.
Несмотря на это, мы с уверенностью можем утверждать, что беспилотных автомобилей пока не существует. Кто-то может возразить, что беспилотные автомобили уже являются реальностью, и дорогах можно встретить автомобили, способные ездить сами (например, автопилот от компании Tesla). Но так ли это на самом деле?
Что такое беспилотный автомобиль?

На текущий момент мы добились только частичной автоматизации вождения, но не полной автономности. Беспилотные автомобили сейчас могут передвигаться только в определенных условиях и требуют внимания со стороны человека.
Что такое беспилотный автомобиль? Означает ли это, что машина может ездить с небольшим вмешательством человека? Или это автомобиль, способный разумно ориентироваться? Или он передвигается вообще без помощи человека в любых ситуациях и при любых условиях? Можно дать много определений.
В теории:
Полностью автономная система должна быть способна: собирать информацию об окружающей среде, работать продолжительное время без человеческого вмешательства и накапливать знания для совершенствования методов выполнения своих задач или адаптации к изменяющимся условиях.
Лучшие на начало 2019 года представители беспилотных автомобилей довольно далеки от этого определения.

SAE, орган стандартизации автомобилей, опубликовал отчет, в котором формально определил 6 уровней автономности самоуправляемых автомобилей.
Уровни автономности беспилотных автомобилей

Уровень 0: Автоматизированная система выдает предупреждения и может мгновенно вмешаться, но не имеет постоянного контроля над автомобилем.
Уровень 1 (“с руками”): Водитель и автоматизированная система делят контроль над автомобилем. Например, адаптивный круиз контроль: водитель контролирует рулевое управление, а система — скорость; или помощник для парковки, когда рулевое управление контролируется системой, а контроль скорости осуществляется вручную. Водитель всегда должен быть готов взять управление в свои руки. Система предупреждения о сходе с полосы — еще один пример первого уровня автономности.
Уровень 2 (“без рук”): Автоматизированная система берет полный контроль над машиной (ускорение, торможение, рулевое управление). Водитель должен отслеживать движение и быть готов в любой момент немедленно вмешаться, если система откажется корректно работать. Сокращение “без рук” не следует понимать буквально. Контакт между рукой и рулём всё еще необходим, согласно классификации SAE 2, чтобы подтвердить готовность водителя немедленно вмешаться.
Уровень 4 (“не думая”): Водитель может спокойно лечь спать или покинуть водительское место. Самостоятельное движение автомобиля возможно только на ограниченных пространственных участках (геозонах) или в специальных условиях, таких как пробки. Автомобиль должен безопасно завершить поездку, например, припарковаться, если водитель не взял управление под свой контроль.
Уровень 5 (“управление по желанию”): Вмешательство со стороны человека не требуется вообще. Примером такого уровня развития технологий является роботизированное такси.
В следующей главе этой статьи я кратко объясню основные составляющие текущих самоуправляемых автомобилей и расскажу о современном состоянии развития и важности каждой из частей. Также будет сказано об основных игроках на этом рынке.
Оборудование беспилотного автомобиля
В разговорах об автономном вождении часто упоминают искусственный интеллект, алгоритмы и софт. Но железо играет ключевую роль в достижениях в области беспилотных авто, ровно как и другие компоненты, упомянутые выше.
Со стороны железа оборудование, необходимое для автономного вождения, включает сенсоры, технологии связи, силовые приводы, а также специальные платформы для беспилотного движения.
Сенсоры
Сенсоры снабжают машину всей необходимой информацией об окружающей среде и окружении. Способность выполнять автоматизированные задачи сильно зависит от возможности собрать достаточное количество корректных и релевантных данных о состоянии окружающей среды.
LIDAR
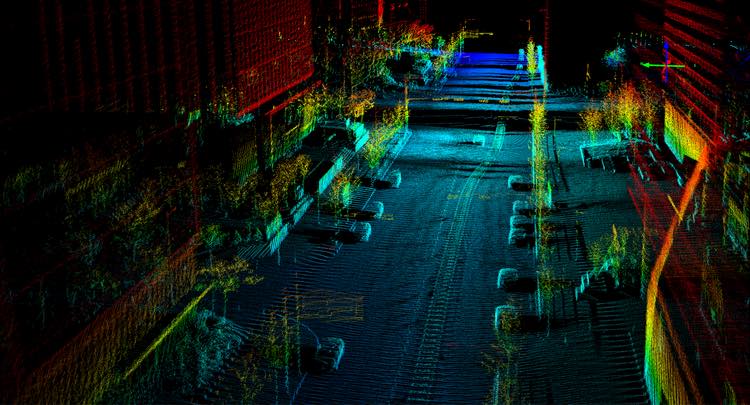
Лидар
Сенсорам LIDAR пророчат блестящее будущее в системах беспилотных авто. С помощью них производится трехмерное сканирование окружающей среды, что дает намного больше информации, чем обычный сканер в камере. Камеры обеспечивают детали, но требуют специального программного обеспечения на основе машинного обучения для преобразования 2D изображения в 3D. LIDAR напротив предоставляет точные и удобные для компьютера данные в форме точных измерений.
Большая часть серьезных игроков в области беспилотных авто считают сенсоры LIDAR незаменимыми компонентами самоуправляемой машины. Однако из-за высокой стоимости этого сенсора (не беря в расчет сложности, возникающие при обработке больших объемов данных, 3D сканов с LIDAR в реальном времени) не ясно, будут ли в будущем датчики LIDAR частью системы автономного вождения 5 уровня.
Рынок LIDAR сенсоров стремительно растет на ожиданиях о будущем использовании в беспилотных автомобилях. Однако на данный момент цена является серьезной угрозой для рынка LIDAR.
Производители лидаров:
- Continental зашла на рынок LIDAR устройств после поглощения части бизнеса Hi-Res 3D Flash LIDAR компании Advanced Scientific Concepts в марте 2016 года. Теперь continental предлагает свои трехмерные лидары (без подвижных частей) и лидары (SRL-121).
- Velodyne предлагает датчик AlphaPuck LIDAR. Его цена составляет около $12 000, а сам он является первым 300м сенсором с 128 каналами (слоями). Кроме AlphaPuck (улучшенной специализированной версии VelodynePuck), Velodyne предлагает Veladome и Velarray. На старую версию AlphaPuck в прошлом году цена была снижена на 50%, что связано с модернизацией производственного процесса компанией. Самый мощный LIDAR сенсор — HDL-64E — имеет 64 слоя, 360 FOW и до 2,2 миллионов точек в секунду. Этот сенсор чрезвычайно дорогой — до $100 000 за экземпляр.
- LIDAR Scala от Valeo является первым коммерческим лазерным сканером, нашедшем применение в автомобильной отрасли. Scala — механический лидар, покрывающий 145 градусов. Valeo сотрудничает с Ibeo и Audi, чтобы сделать лидар Scala коммерчески доступным.
Рынок LIDAR устройств оказывается разделенным, борьба за первенство обещает быть интенсивной.
Камера

Когда дело доходит до датчиков камеры, то здесь стоит отметить цену. Камеры относительно дешевые, поэтому автономное средство передвижения может иметь их несколько, чтобы получать больше информации об окружающей среде. Можем увидеть, что для автоматизации вождения компании, такие как Tesla, полагаются на камеры и машинное зрение (Tesla избегает датчики LIDAR в своих продуктах). Когда на рынке мы имеем дело с камерами, мы видим, что они xчасто идут вместе с программным обеспечением (с использованием или без использования искусственного интеллекта) или встроены в специальные сенсоры. Стоит отметить, на текущий момент камеры являются основным компьютерным решением восприятия для продвинутых систем автономного вождения.

Оценка глубины на изображении при помощи Encoder-Decoder сетей
Ambrella — компания, которая работает над беспилотным авто на основе только камер. Прототип автомобиля от Ambrella оснащен дюжиной их стереокамер SuperCam3 с разрешением 4К, каждая из которых имеет угол обзора в 75 градусов.
Mobileye — еще одна компания, работающая с камерами и компьютерным зрением для автономного вождения. Их нано-камера идет в связке с программой для визуальных решений для поддержки продвинутых систем помощи водителю (ADAS).
Радар
Радар — третий наиболее распространенный сенсор для беспилотных автомобилей. По сравнению с лидаром и технологиями оптического зондирования, радары в основном нечувствительны к погодным условиям в окружающей среде, таким как туман, дождь, ветер, темнота или яркое солнце, но у них остаются нерешенные технические проблемы. Многие производители оборудования и серьезные игроки на рынке самоуправляемых автомобилей вкладывают средства в развитие радаров. Tesla в своих автомобилях использует радары в качестве основных датчиков.
На этом рынке можно отметить ключевых игроков — Bosch, Valeo, 6th sense, SDS, Toposens.
V2X ( Vehicle-to-everything ) означает передачу информации между устройством и любым объектом, который может оказать влияние на это устройство. Системы V2X включают в себя такие коммуникационные технологии как устройство-устройство ( vehicle-to-vehicle, V2V ), устройство-инфраструктура ( vehicle-to-infrastructure, V2I ), устройство-пешеход ( vehicle-to-pedestrian, V2P ), устройство-сеть ( vehicle-to-network, V2N ).
Сегодня наиболее значимая проблема для развития V2X — требование в коммуникационных системах высокой надежности с маленькой задержкой. Здесь основными технологиями выступают IEEE 802.11p и Cellular V2X both, которые имеют свои преимущества и недостатки.
Несколько дней назад компания Ford анонсировала, что к 2022 году все их легковые и грузовые автомобили, продаваемые в Америке, будут снабжены технологиями C-V2X от компании Qualcomm. Также в рамках V2X недавно были представлены демонстрации, акцентирующие внимание придорожных элементах, что соответствует технологиям коммуникации устройство-инфраструктура.
Ключевые игроки: Continental (Германия), Qualcomm (США), NXP Semiconductors (Нидерланды), Robert Bosch (Германия), Denso (Япония) и Delphi Automotive (Великобритания).
Платформы для разработки
Nvidia — одна из немногих компаний, занимающихся созданием хардварных платформ, которые снабжены необходимыми вычислительными мощностями и оптимизированы под программное обеспечение для беспилотных автомобилей.
NVIDIA DRIVE AGX — открытая масштабируемая платформа для задач автономного вождения, которая выступает в качестве мозга для автономной машины. Единственная хардварная платформа такого рода, NVIDIA DRIVE AGX, обеспечивает высокопроизводительные, энергоэффективные вычисления для беспилотников на основе ИИ.
Программное обеспечение
Говоря про автономные средства передвижения, большое внимание уделяют “интеллекту” машины, её способности принимать решения. Как я уже говорил, программное обеспечение находится сейчас в центре внимания. Возможно, это связано с тем, что сейчас искусственный интеллект существует только в форме софта.
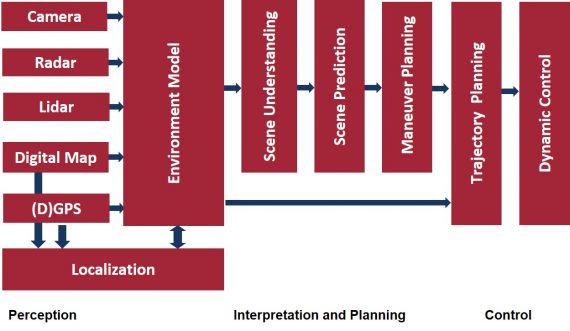
Продвинутые системы помощи водителю (Advanced Driving-Assistance Systems, ADAS) включают в себя все алгоритмы, которые помогают выполнять задачи вождения. ADAS также содержит алгоритмы, которые являются частью автоматизированного вождения, а не только алгоритмы и софт, специально предназначенные для автономных транспортных средств. Основная часть ADAS софта может быть разделена на 3 большие группы: восприятие, планирование, контроль.
Восприятие
Восприятие — единственные связующе звено между машиной и окружающей средой. В алгоритмах восприятия зачастую используются нейронные сети, чтобы придавать смысл сырым входным данным с сенсоров (или данные V2X). Такие алгоритмы как детектирование объектов, отслеживание объектов, Sensor Fusion и Object Fusion находятся именно в этой части. Самые современные алгоритмы восприятия в большинстве своем основаны на глубоком обучении.
Планирование
Модуль планирования отвечает за способность машины принимать решения для достижения целей высшего порядка: доехать до определенной точки на карте, припарковаться в безопасном месте. Системы планирования работают благодаря объединению обработанной информации об окружающей среде (с выходов модуля планирования, то есть из сенсоров и компонент V2X) с установленными правилами и знаниями о том, как вести себя в этой среде.
Модуль планирования интенсивно использует карты и каталоги правил, которые определяют “правильные” действия во время вождения.
Контроль
Система контроля заботится о превращении намерений и целей, полученных из системы планирования, в действия. Система контроля подает на аппаратную часть (силовому приводу) необходимый входной сигнал, который приведет к желаемому действию (в соответствии с выходом с модуля планирования траектории). Модуль контроля делает движение более плавным и похожим на стиль езды человека.
Виртуальное моделирование
Для создания сложных алгоритмов ИИ и получить удовлетворительные результаты, необходимы большие объемы данных. Однако цена сбора больших данных, а в особенности редко встречающихся сценариев вождения, очень высока. Это делает проблематичной тренировку моделей ИИ с использованием реальных дорожных условий.
Более того, чтобы показать, что беспилотные системы имеют небольшую вероятность попасть в аварию, требуются массовые испытания таких автомобилей. В результате получается замкнутый круг.
У этой проблемы есть решение — моделирование, или симуляция. Синтетические данные и часто используют для обучения больших моделей. Сейчас симуляции играют главную роль в мире автономного вождения. Обе проблемы — тренировка и валидация — могут быть решены при помощи синтетических данных (как только лишь с ними, так и в комбинации с данными из реального мира).
Компании, тестирующие беспилотные автомобили
В настоящий момент все больше компаний тестируют свои автономные разработки. Я рассказал лишь о нескольких компаниях, но полный список этим не ограничивается.
Подводя итог, 2019 год станет захватывающим годом, который, как ожидается, принесет многое в области развития автономного вождения. Но пока точно неизвестно, появятся ли беспилотные автомобили повсеместно на дорогах общего пользования, или же для этой амбициозной цели понадобится новый технологический рывок.

Многие относятся к беспилотным автомобилям, как к технологии будущего, не подозревая, что оно уже наступило. Что вы скажете на то, что люди в мире уже передвигаются на роботачках, а такой способ езды признан едва ли не в два раза более безопасным, чем стандартное вождение?
Беспилотные автомобили есть и в России, в 2019 году на дорогах можно встретить не только легковые машины, но и грузовые, на базе Камаза. В Москве вовсю катаются беспилотные такси от Яндекс – эти машины никогда не опаздывают и умело объезжают городские пробки. Как видите, робомобили постепенно входят в наши жизни, а уже 2030 году планируется их повсеместное и массовое использование.

Хотите знать, как работает беспилотный автомобиль, какими системами он управляется, и кто выпустил самый первый в истории транспорт без водителя? Об этом и не только – в нашей статье!
Как работает беспилотник?
За беспилотным транспортным средством никто не следит, оно на самом деле едет самостоятельно. Управление осуществляют различные автономные системы, которые отслеживают каждый параметр. Программное обеспечение беспилотного автомобиля базируется на алгоритмах метода моментальной локализации и анализе карт местности в режиме реального времени. Другими словами, датчики на машине (камеры, радары, сенсоры) и система спутниковой навигации вместе имитируют человеческий фактор, принимая решения об увеличении или уменьшении скорости, построении маршрута, экстренном торможении и т.д.
Основные системы
Чтобы вы лучше разобрались, как передвигаются беспилотные авто в Москве и в мире, давайте перечислим основные системы автономного передвижения:

Итак, вы увидели в Москве беспилотную машину, допустим, это такси от Яндекс. Давайте проанализируем, каким образом она едет:
- Перед стартом лидар генерирует карту местности и передает ее компьютеру. Последний соединяет информацию с данными в своей памяти;
- Радары сканируют объекты вокруг, позволяя компу выявлять свободный коридор движения;
- Видеокамеры и сенсоры сообщают ситуацию на дороге. Компьютер анализирует деятельность других участников движения, жесты инспектора ГИБДД, сигналы светофора, туман, гололед, слабую видимость и принимает решение о перемещении.
- Одновременно, через Интернет поступает информация о дорожных заторах, пробках, авариях и закрытых на ремонт участках. В результате беспилотный автомобиль строит оптимальный, безопасный и комфортный маршрут для передвижения из пункта А в пункт Б.
Как видите, мир не стоит на месте. На дорогах города маневрируют автомобили без водителей, а в самолетах есть WiFi 🙂 .
Уровни автономности
В настоящее время автономная система проходит режим пробации. В Москве давно начали тестировать беспилотные автомобили, но в тачках все равно по-прежнему присутствует водитель.

Тестирование беспилотных автомобилей в России сегодня ограничено законодательной базой, которая пока не разрешает внедрение пятого уровня автоматизации. Однако, президент поручил оптимизировать этот процесс и ускорить его повсеместное введение. Ожидается, что уже к 2025 году беспилотные автомобили появятся в открытом доступе, как минимум во всех крупных городах страны.
История беспилотников в мире и России

Сегодня разработкой беспилотных автомобилей занимаются многие компании, среди которых лидируют:
- Tesla;
- General Motors;
- Автономные авто от Гугл;
- Volkswagen;
- Audi;
- BMW;
- Volvo;
- Nissan;
- Cognitive Technologies.
В России

Беспилотный транспорт от Яндекс
Крупнейшая российская IT-компания давно занимается разработкой беспилотных технологий. Такси беспилотники успешно колесят по Москве, Санкт-Петербургу, Екатеринбургу и другим крупным городам России, правда, пока с водителем для подстраховки. Регулярно осуществляются пробные поездки на дальние расстояния.

Автопарк беспилотных автомобилей Яндекса включает следующие прототипы: Kia Soul, Toyota Prius, Hyundai Sonata. Этими марками проще всего управлять при помощи электроники. К слову, марка автомобиля не играет существенной роли, ведь беспилотный софт и модуль можно установить в любое авто. Кстати, Яндекс планирует в будущем продавать свою технологию. Совсем скоро любой желающий сможет купить систему и поставить ее в собственной тачке. Кто знает, может уже через 10 лет на дорогах не останется машин с водителями за рулем.
Tesla
Эта компания знаменита своей деятельностью по производству и продаже электромобилей. Неудивительно, что она занялась внедрением в свой транспорт беспилотной технологии, ведь область знаний в области электронных инноваций у нее гораздо шире, чем у многих других компаний. В 2015 году был выпущен автомобиль с полуавтоматическим управлением, который заслужил множество положительных отзывов обзорщиков. Автопилот умеет ограничивать скорость, придерживаться движения в рамках заданной полосы, держать дистанцию, выбирать оптимальный режим езды. Машина умеет разгоняться до 200 км/ч и проезжает на одной батарее до 400 км. Пилот, все же, нужен.

Цена нового беспилотного автомобиля Тесла в Америке сегодня составляет около 35-40 тыс. долларов. В России стоимость выше на 5-7 тысяч.
Робомобили от Google

Автономная система анализирует информацию из Google Street View, данные с радаров, видеокамер и датчиков, установленных на машине и формирует алгоритм движения. В 2016 году компания запатентовала технологию распознавания проблесковых маячков на спецтехнике. В настоящее время в Мичигане строится завод по производству беспилотников от Гугл с уровнем автономности 4.
Это крупнейший мировой сервис по заказу такси. С 2016 года выпустил на дороги беспилотные тачки с полуавтоматическим управлением. Пока они ездят только в США, рядом всегда присутствует водитель. Он контролирует автономную систему, одновременно тестируя и проверяя ее безопасность. Марка авто — Ford Fusion, всего компания внедрила около 100 таких тачек.

Грузовики и тягачи
Вы только представьте, как было бы удобно отправлять в дальние рейсы автомобили без водителей. Никто не будет уставать, засыпать за рулем, надолго покидать родных и близких.
Мы вас не удивим, но и эта мечта практически стала реальностью! В 2016 году компания Мерседес уже протестировала автономную систему управления груженой техникой. В рейс из Штутгарта в Голландию (600 км) отправили три машины. Все они прибыли вовремя и без каких-либо происшествий в пути. Эксперимент удался, более того, было выявлено, что при таком управлении меньше расходуется топливо.

General Motors
Поговорим о достижениях еще одного крупнейшего мирового разработчика беспилотной технологии. Совсем недавно концерн представил миру собственный автономный автомобиль без руля и педалей. Также он запросил у Администрации дорожного движения США разрешение на использование таких авто в сервисе роботакси. Марка машины — Chevrolet Bolt, она оснащена 5 лидарами, 16 видеокамерами, 21 радаром и мощным компьютером. Уже в 2020 году компания планирует выпустить более 2500 подобных тачек. Круто, не так ли?

Стоимость (прогнозы)
Серийное производство робомобилей, а также их повсеместная активная продажа планируются к 2022-2025 годам.

Если вас интересует, нужны ли права для езды в беспилотнике, мы не дадим точного ответа. В США автоматизированными системам управления Гугл официально присвоен статус водителя. Соответственно, чтобы ездить на таком авто, права иметь не обязательно. Однако, сегодня в мире нет машин с 5 уровнем автономности, которые свободно ездили бы по улицам. Такой транспорт существует, но он до сих пор тестируется и проходит пробацию.
Все остальные уровни требуют присутствия водителя, который, в свою очередь, должен иметь водительские права.
Вопрос безопасности
Ну что же, мы выяснили, сколько сегодня стоит беспилотный автомобиль и как он работает. Давайте поговорим о главном – насколько безопасно ездить в такой тачке?

Сначала выявим плюсы технологии:
- Снижение человеческих жертв и количества аварий. Мы уже писали, что такое авто не устает, не теряет бдительность, не упускает из виду ни одну деталь. Оно ездит аккуратно и безопасно;
- Экономия топлива, а также экономическая выгода (не нужно платить зарплату водителям);
- Оптимизация износа дорожного покрытия (отсутствие агрессивной езды);
- Возможность передвигаться на авто для людей без водительских прав и несовершеннолетних, что невозможно даже для каршеринга;
- Экономия времени (во время езды можно работать или спать);
- Возможность перевозить грузы в опасных локациях (техногенных, в местах военных действий);
Надеемся, мы ответили, зачем нужны беспилотные автомобили. Теперь перейдем к проблемам, которые, практически, всегда связаны с вопросом безопасности:
А теперь рассмотрите иной сценарий. Либо авто сбивает троих детей на перекрестке, или на полном ходу влетает в стену. Пассажир (вы) может погибнуть. Как должен поступить компьютер? Согласно этическим нормам (и логике), разумнее подвергнуть риску одного, сидящего внутри тачки. Так ответит любой нормальный человек.
Но вот в чем вопрос – сядете ли вы в автомобиль, зная о таком алгоритме, заложенном в его сценариях поведения?

Эра беспилотников наступает, и она неизбежна. Так же когда-то было с мобильными телефонами. Кто-нибудь сегодня может себе представить жизнь без умной трубки?
Шесть уровней автономности
Беспилотные автомобили — это машины, которые безопасно ездят по дорогам общего пользования без участия человека; ими управляет компьютер и датчики, объединенные в единую систему автономного вождения. Уровень автономности системы устанавливается его производителем.
Те автомобили, на которых ездит каждый из нас, уже входят в систему автономных транспортных средств. Дело в том, что нулевой уровень автоматизации предполагает ее полное отсутствие. Пятый — наивысший уровень — в свою очередь подразумевает, что система управляет автомобилем так же хорошо, как опытный водитель. Уровни определены SAE International, профессиональной ассоциацией автомобильных инженеров, и кратко описывают, насколько та или иная система готова отдать управление автомобилем в руки компьютера. Категории SAE сейчас применяются повсеместно: регуляторами, инженерами, автопроизводителями и инвесторами.
- Категории начинаются с Уровня 0 (машины с ABS и круиз-контролем относятся к нему).
- На Уровне 1 автомобиль уже немного помогает водителю: появляется, например, адаптивный круиз-контроль и контроль руления или торможения, но только один из двух.
- Система управления Уровня 2 может контролировать и руление, и торможение, но, как и уровнем ранее, только при определенных обстоятельствах: например, на шоссе водителю приходится вмешиваться. Если проще — машина может ехать сама, но водителю нужно быть готовым в любой момент взять управление на себя.
- На Уровне 3 автономности у машины чуть больше, а значит, у водителя больше времени, чтобы среагировать и взять контроль над автомобилем в любой непонятной ситуации. Если Уровень 2 предполагает, что водитель всегда следит за дорогой и готов включиться в любой момент, то на Уровне 3 роль водителя — быть в резерве.
- При автоматизации Уровня 4 система берет на себя полный контроль, позволяя водителю отдохнуть, но только если для этого созданы все условия — например, есть высоко детализированные трехмерные карты, чтобы система с точностью до пары сантиметров знала, где находится. Большинство разработчиков пытаются создать системы именно этого уровня.
- Уровень 5 предполагает полную автоматизацию — в этой гипотетической ситуации перед водительским креслом даже нет руля. Согласно последнему отчету Autonomous Vehicle Technology Report 2020, в мире не существует работающих технологий 5-го уровня автономности. Эксперты не ожидают появления таких технологий и в обозримом будущем: высоко автоматизированные системы будут применяться только в качестве продвинутых помощников водителя.
Кто работает на этом рынке в России
НПО инвестирует в проект собственные средства — на сегодня это десятки миллионов рублей, два миллиона из которых — стоимость автомобиля (по видео с сайта StarLine можно увидеть марку Skoda). Самые дорогие компоненты в беспилотном автомобиле, по словам представителя компании, — установленные на него датчики, например, лидары (оптические лазеры). Согласно сайту, на автомобиле установлены 12 датчиков.

Альянс — это объединение томских компаний и научных лабораторий с компетенциями в сфере технического зрения, разработки сенсоров, роботизированных аппаратных комплексов и различных систем управления. Сейчас в Альянсе 16 компаний, разработкой беспилотного автомобиля заняты девять из них. Они разработали мультисенсорную версию технического зрения, с помощью которого строится траектория движения по проезжей части, идентифицируются все встречные объекты.
Главное отличие технологии из Томска — именно в техническом зрении. Большинство создателей беспилотных автомобилей для ориентации автомобиля в пространстве используют оптические системы (камеры и лидары), которые передают сигналы компьютеру о том, что происходит вокруг, объясняет руководитель альянса Виктор Ширшин: какой сигнал светофора, где вокруг машины и люди и так далее. Но такие автомобили не помогут проехать через суровые погодные препятствия, например, через снежную пушку. Буран оптические лазеры воспримут просто как стену, и автомобиль остановится. В свою очередь, система из Томска основана на сенсорах видеокамер, радарах и системе томографического зрения, которое может видеть сквозь туман, говорит Виктор.
Фото: Smart Vision Tomsk
Cognitive Pilot
В ноябре 2019 года стало известно, что Сбербанк и Сognitive Technologies создадут компанию Cognitive Pilot для развития беспилотных технологий. Банк получил 30% акций компании, остальные 70% принадлежат Cognitive Technologies, которая инвестировала в софтовое направление Cognitive Pilot $22 млн, а в направление сенсоров — $4 млн, рассказывает глава компании Ольга Ускова в интервью ТАСС.
Cognitive Pilot развивает усовершенствованные системы помощи водителю (Advanced Driver Assistance System — ADAS) на базе технологий искусственного интеллекта и систем автономного управления автомобилем и промышленными устройствами. Решения C-Pilot подходят для автономного движения всех видов транспорта, от легковых автомобилей до поездов и сельхозтехники.

Фото: TAdviser (2016 год)

Фото: Артем Ганжа/Платформа НТИ
BaseTracK
В 2018 году работающий прототип беспилотного автомобиля Уровня автономности 3 был готов. В сети появилось видео о том, как автомобиль BaseTracK двигался автономно со скоростью 60 км/ч зимой по гололеду. Для автомобилей, работающих на существующих оптических системах, это невозможно.
В 2018 году BaseTracK проводили тестирование на трассе Москва — Волоколамск и после выступали с результатами на крупнейших форумах автомобильных инженеров — Autonomous Vehicle Technology Expo & Conference 2018 в Штутгарте, Германия, и FISITA World Automotive Congress 2018 в Ченнай, Индия. Сейчас компания ведет несколько пилотных проектов в странах Европы, в Японии и на Аравийском полуострове, но детали пока не раскрывает.


Кто нам конкурент
Кроме того, с 1 марта 2020 года правительство расширило список регионов, в которых разрешено тестировать беспилотные автомобили: вместо двух — Москвы и Татарстана, где тесты проводят с 2018 года — их стало 13. Среди них Ханты-Мансийский и Ямало-Ненецкий автономные округа, Краснодарский край, Санкт-Петербург и другие. Эксперимент будет длиться два года.
Подстраивается под нужды беспилотников и Москва — в этом году власти столицы планируют открыть собственный полигон для их тестирования. Его организуют на территории Новой Москвы, где будет воспроизведена городская среда с имитацией различных видов дорог, кругового движения, дорожных знаков и светофоров. Проводить испытания на площадке смогут любые команды по предварительной записи.
Что мешает развитию рынка
Нехватка полигонов для тестирования беспилотников — одна из проблем, с которой сталкиваются все разработчики, говорит Константин Кайсин из РВК. Вторая проблема, над которой сейчас работает весь мир, юридически-философская: кто должен нести ответственность за действия беспилотника?
Первый случай со смертью по вине беспилотника произошел в 2016 году во Флориде, США, когда Tesla Model S врезалась в трактор, который незаконно пересекал шоссе. Водитель — единственная жертва этой аварии — находился за рулем автомобиля, но машиной управлял автопилот. Двумя годами позже тестовый беспилотник Uber насмерть сбил пешехода. В России законов, регулирующих поведение беспилотников, пока нет — в машине всегда должен находиться человек (инженер-испытатель), который и контролирует автомобиль. Самой передовой страной является США, где 29 штатов и округ Колумбия уже прописали в местном законодательстве правила использования беспилотников. Правила варьируются в разных штатах; в самом прогрессивном законе — во Флориде — ответственность могут вменять человеку, который запустил автомобиль по маршруту (в законе он называется оператором), производителю системы помощи водителю или обоим сразу.
Читайте также: